La toute première version du logiciel a fonctionné en septembre 2023 sur un traqueur en bois à deux axes combinés. Dans d’autres articles tu peux trouver la dernière version en cours à structure métallique.
Cet article présente la version V10 du logiciel du traqueur solaire, actuellement en cours de finalisation.
Les captures d’écran et les éléments listés ci-dessous reflètent l’état actuel du développement, avec les fonctionnalités existantes et les améliorations par rapport aux versions précédentes. Bien que la plupart des captures d’écran sont faites depuis un smartphone, le logiciel fonctionne sur toutes les plateformes avec la possibilité d’adapter la largeur de l’affichage.
D’une manière générale, le code a été allégé et amélioré, (séquences, algorithmes automates, performances CPU, gestion des alertes, ajout de fonctionnalités…) bref, un gros chantier.
Interface générale
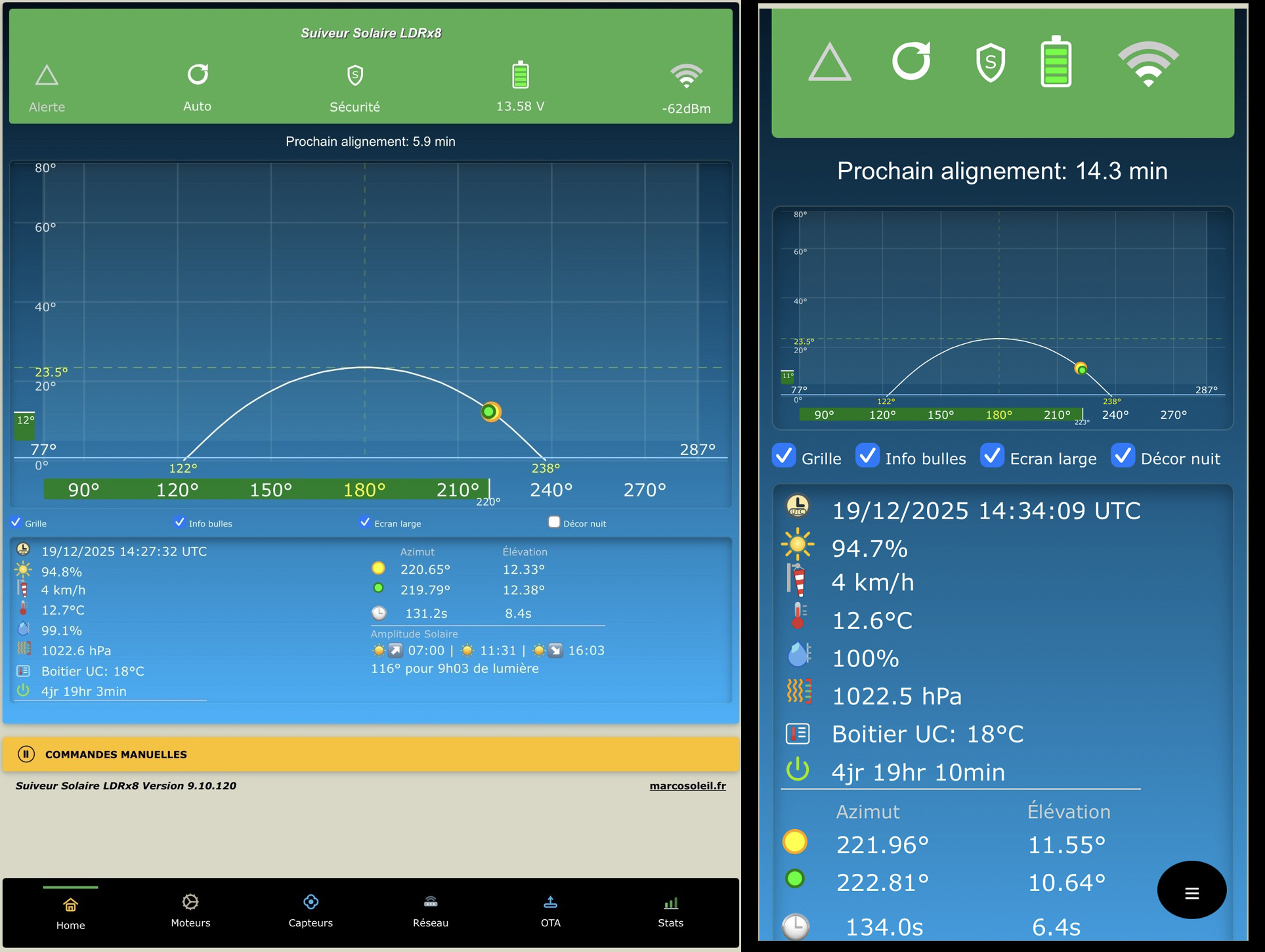
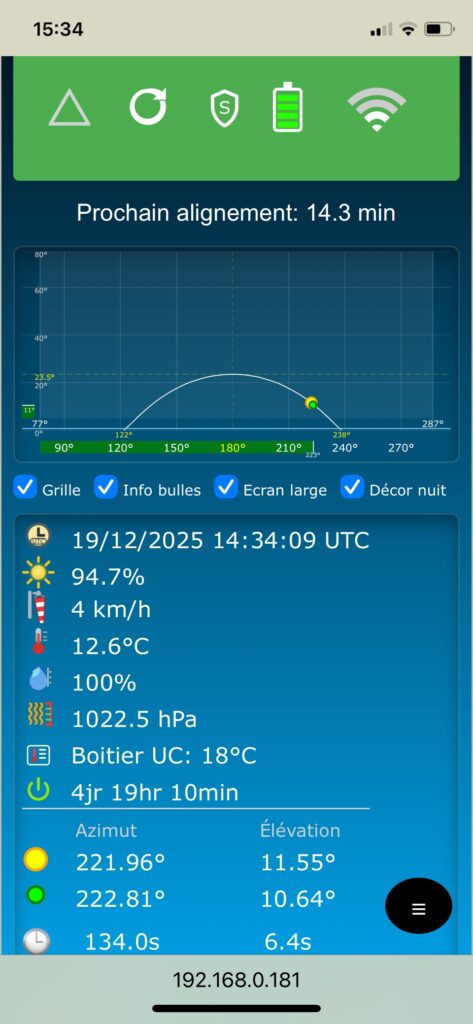
La page d’accueil regroupe les informations principales et l’état général du traqueur.
Elle permet d’avoir une vue synthétique du fonctionnement et de l’activité en cours. il affiche la position du Soleil et du Traqueur en temps réel ainsi que les infos météo et vent si les capteurs sont installés. Les icônes du haut passent au rouge lorsqu’une anomalie est détectée. Le système peut alors afficher l’information complète en cliquant sur le triangle.
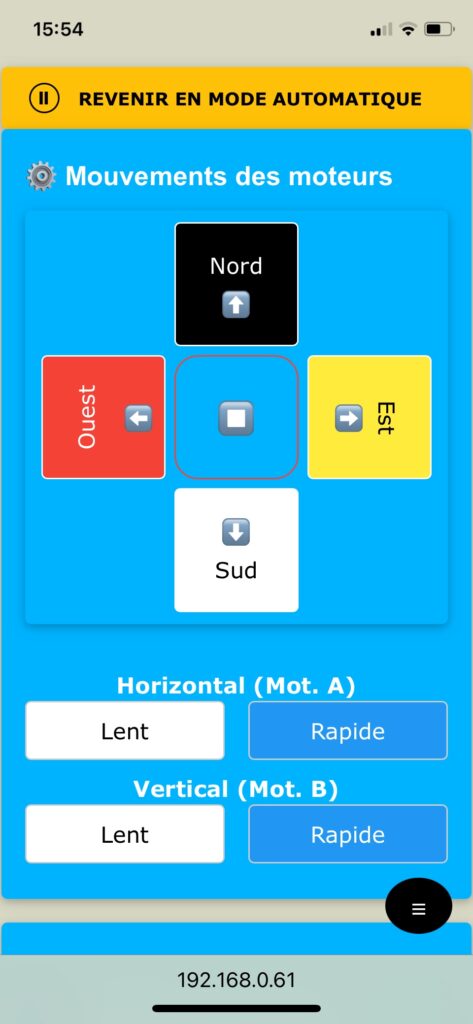
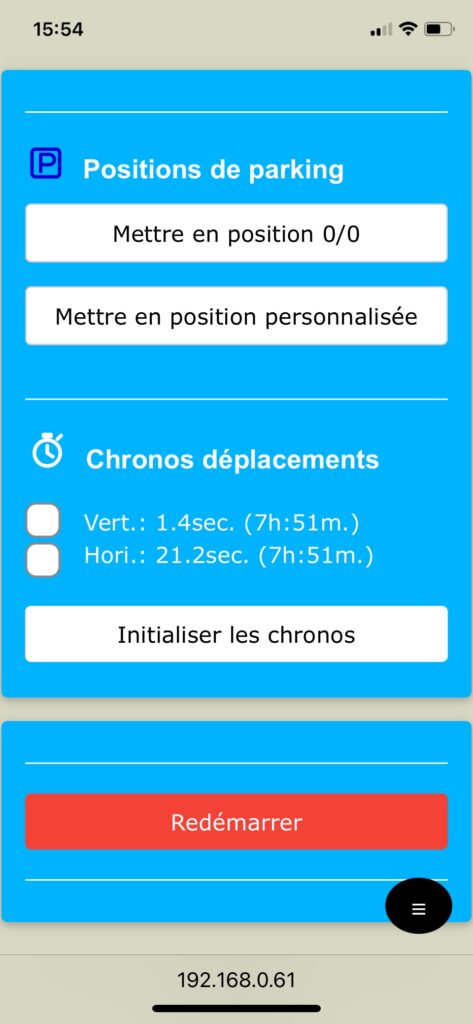
Cet écran permet également de passer en mode manuel pour déplacer les vérins à l’aide des commandes par axe. La section « Positions de parking » et « Chronos de déplacements » ont les mêmes fonctionnalités que la V9, mais les algorithmes ont été améliorés. Néanmoins, le logiciel est conçu pour utiliser le mode manuel uniquement lors de la configuration, les réglages des vérins et butées. Le mode manuel (hors maintenance lourde) reste disponible bien que le Traqueur puisse être totalement autonome pendant des mois sans wifi ni interventions depuis les commandes manuelles. Une fois réglé, le logiciel fonctionne à partir des réglages enregistrés, sans intervention permanente.
Pages de configurations et réglages moteurs
L’ergonomie des pages de réglages a été améliorée pour avoir une expérience plus agréable visuellement et fonctionnellement. Ces pages permettent d’ajuster le comportement du traqueur par système comme les moteurs, butées et module de puissance, les durées et les paramètres associés.
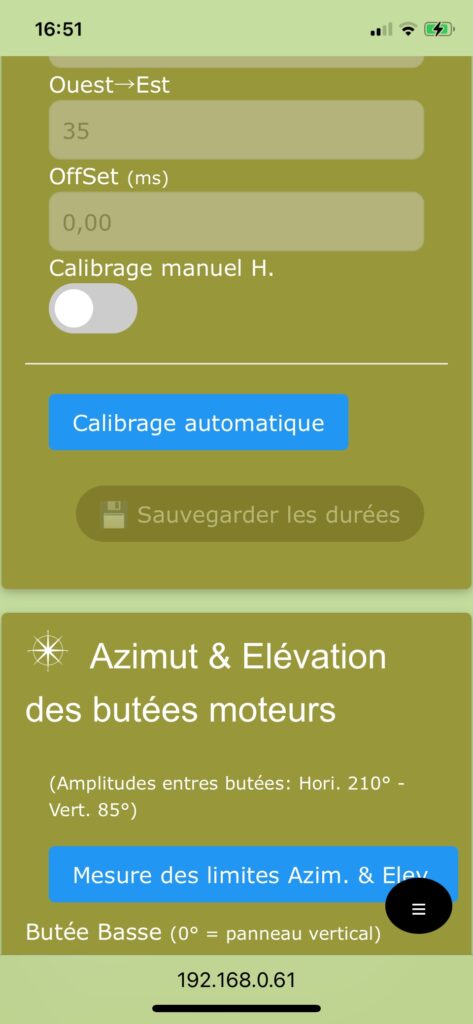
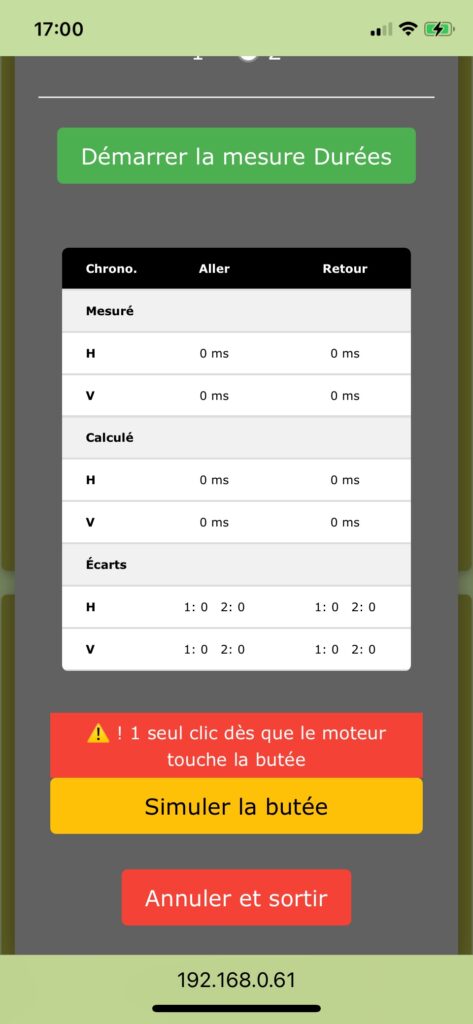
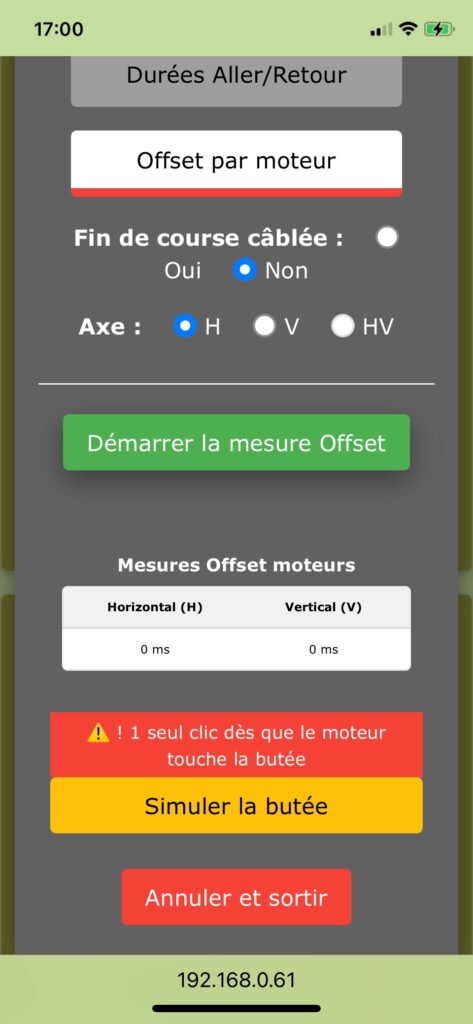
Une nouvelle fonctionnalité de calibrage automatisé des durées et des offsets moteurs permet de facilité la mise en route du Traqueur après une configuration, un remplacement de vérin ou de butée… Le système une fois lancé peut être autonome si le Traqueur est équipé de fin de course extérieur, sinon, il faut simuler la butée par un bouton ou le bouton poussoir qui est utilisé initialement pour activer/désactiver le wifi du Traqueur.
Le calibrage permettant de vérifier les limites d’azimut et d’élévation est en cours de tests de finalisation.
Configurations des capteurs et positions GPS.
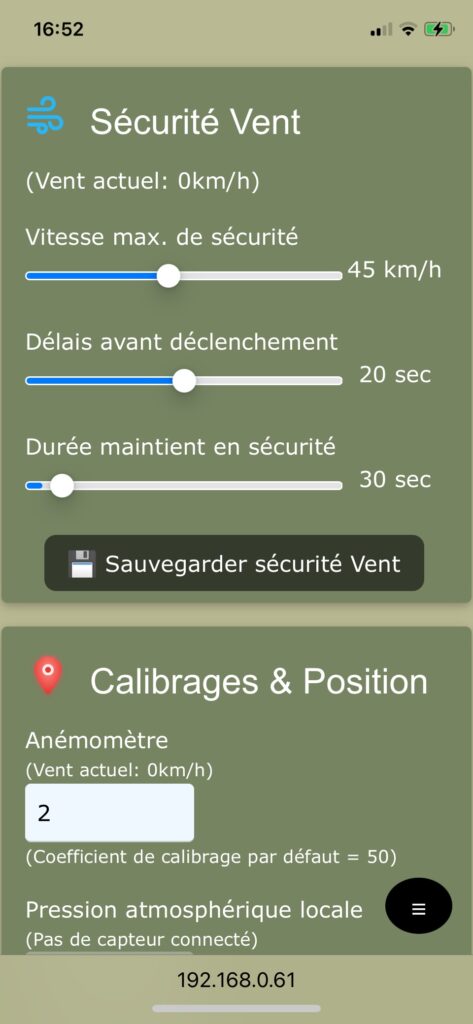
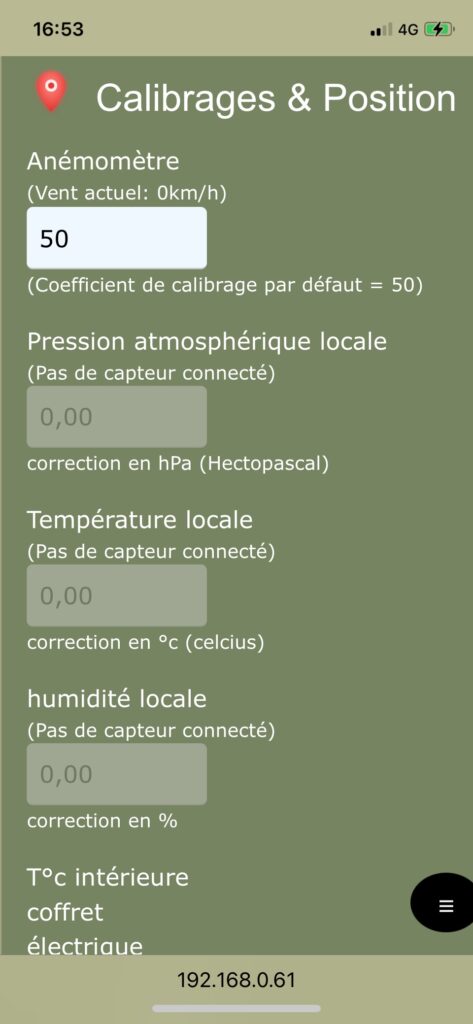
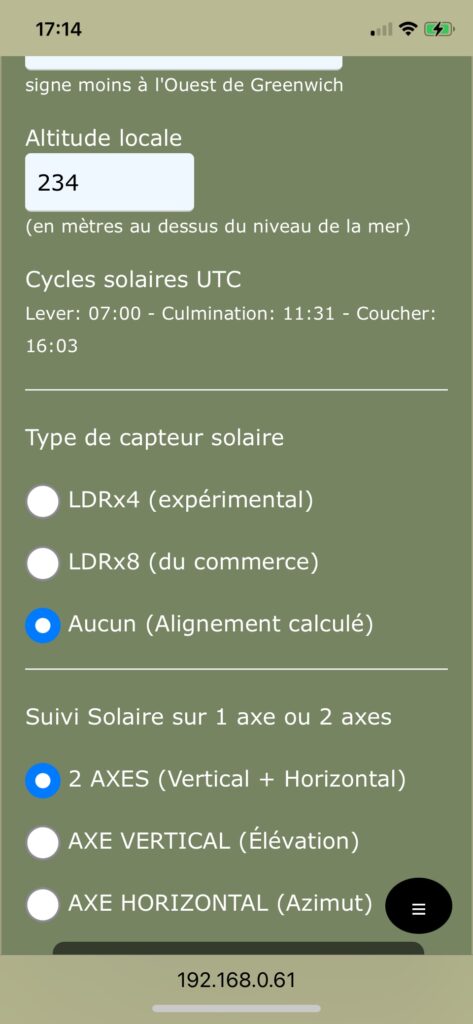
Tout la logique concernant la gestion du vent et de la sécurité à été revue intégralement pour une meilleure réactivité et pour permettre également de partager les données avec d’autres Traqueurs via le Wifi. Un seul anémomètre peut transmettre à tous les Traqueurs. Il est désormais possible de calibrer chaque données du BME280 (capteur MTO) et de régler la température d’alerte de la température dans le boitier ou se trouve toute l’électronique (capteur T°c du DS3231). Les données du BME280 peuvent aussi être partagées avec d’autres Traqueurs.
La position GPS inclue désormais l’altitude du lieu pour une meilleure précision notamment pour les Traqueurs situés en altitude.
Configurations réseau et partage de données.
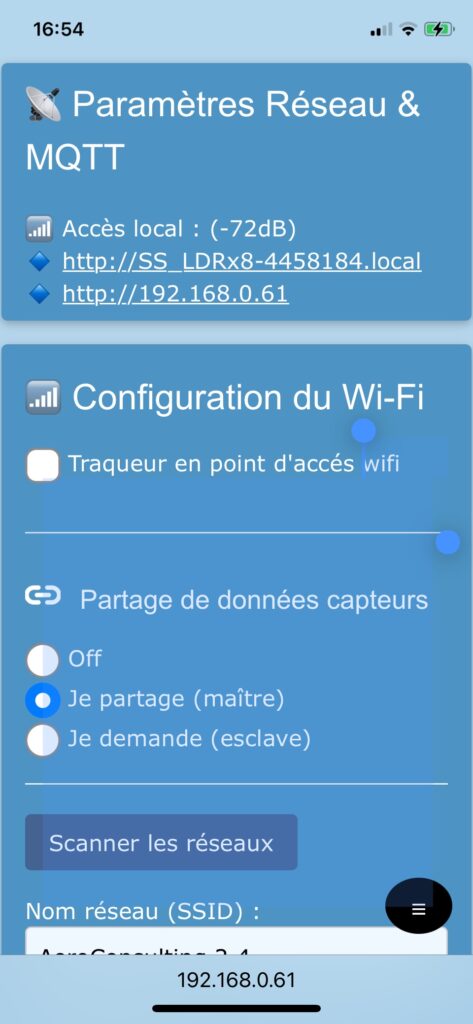


Avec le partage de données, un ESP peut fonctionner en version light, c’est à dire sans aucun capteur mto, ni vent, ni horloge de secours dés qu’il est en mode « Je demande » (esclave) vers un Traqueur Maître. Il suffit simplement de lui indiquer sa position géographique et son altitude, et il peut piloter ses moteurs comme les autres. La gestion MQTT à été améliorée, notamment au niveau des pertes de connexion. Toutes les données arrivent sur Home Assistant automatiquement, comme pour la V9.
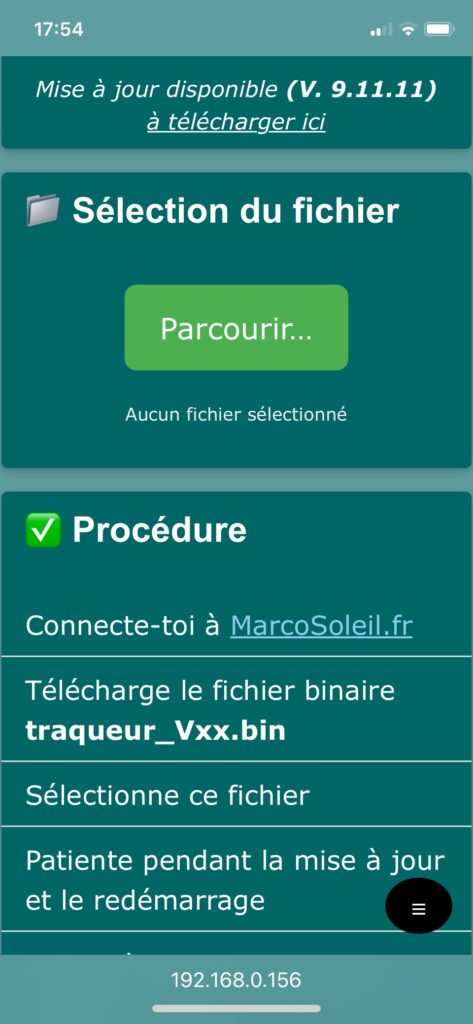
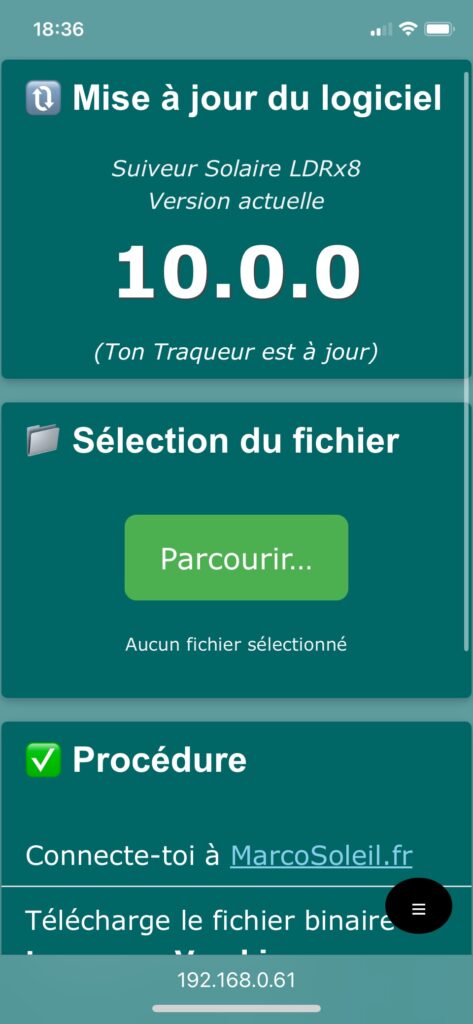
La page de mise à jour.
Cette page a été légèrement remaniée. Elle propose toujours la possibilité de télécharger la dernière version si disponible comme dans l’exemple. La vérification de la version sur le serveur distant à été amélioré.
Page des statistiques.
C’est une nouvelle page qui permet de suivre l’état des systèmes et capteurs sur 12 jours glissants d’un coup d’œil. Cette page est bien avancée, il ne reste plus que la partie capteur de luminosité à implémenter, Le code de la gestion du capteur lumineux a été revu et validé.

la surveillance Vent et Tension Batterie (capteur simple + capteur Triple INA) donnent la possibilité de sélectionner la plage de durée de surveillance (30min, 48hr et 12 jours). Le système détecte automatiquement la présence ou non de la mesure de la tension batterie, ou de la présence d’un module I2C INA. Les courbes s’adaptent automatiquement. Les test INA restent encore à terminer.

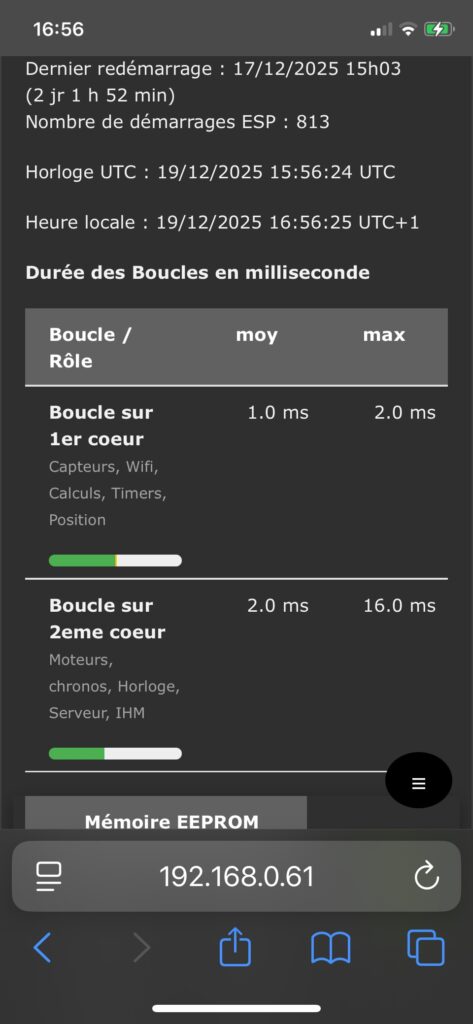
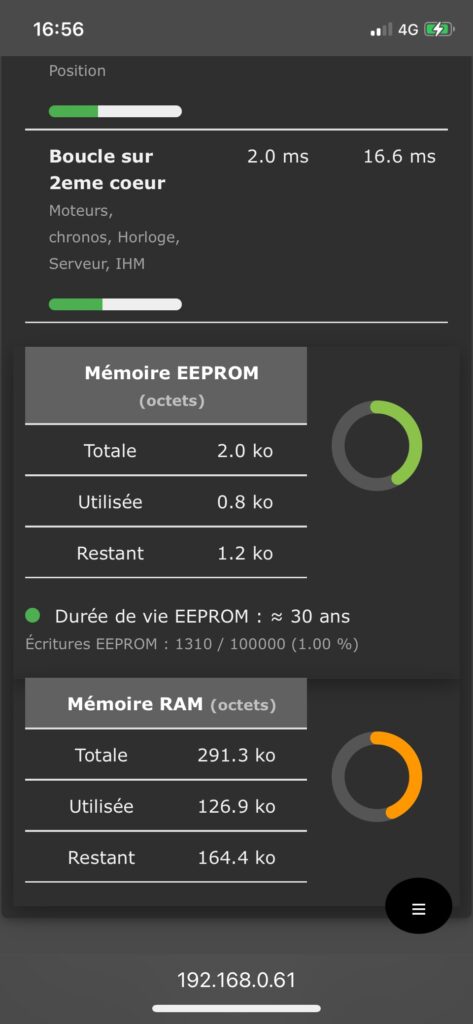
En fin de page, tu trouveras la partie la concernant le taux d’occupation de l’ESP32 (Coeur 1 et 2) à travers les boucles spécialisées (wifi, calculs, moteurs, chronos, serveur web, IHM, capteurs, Timers, position, etc) ainsi que la durée de vie de l’EEprom compte tenu des sauvegardes quotidiennes et des réglages. Il y a de la marge…
Passe me voir de temps en temps pour suivre l’avancement et n’hésite pas à t’inscrire sur le Forum pour poser tes questions et partager tes expériences. Rejoindre le Forum.