Accès rapide dans la page :
Comment câbler ton ESP32 pour piloter ton traqueur Solaire.
Module L298N pour la gestion des moteurs/Vérins.
Module IBT-2 (un module par moteur)
Module PWM H-Bridge – MOSFET IRF3205 (un module pour 2 moteurs)
Montage pour relais de puissances
Le module horloge externe DS3231 (I2C)
Le module météo BME280.
Le module de détection d’Azimut et d’Elevation.
Le module Anémomètre (vitesse du vent).
Les contacts de fin de course.
Module JSY-MK-194G pour mesurer la production solaire.
Câblage pour la mesure du niveau de charge de la batterie.
Calibrage de l’ESP pour la mesure de la tension.
Comment câbler ton ESP32 pour piloter ton traqueur Solaire.
Liste des broches de l’ESP32 utilisées pour le Traqueur:
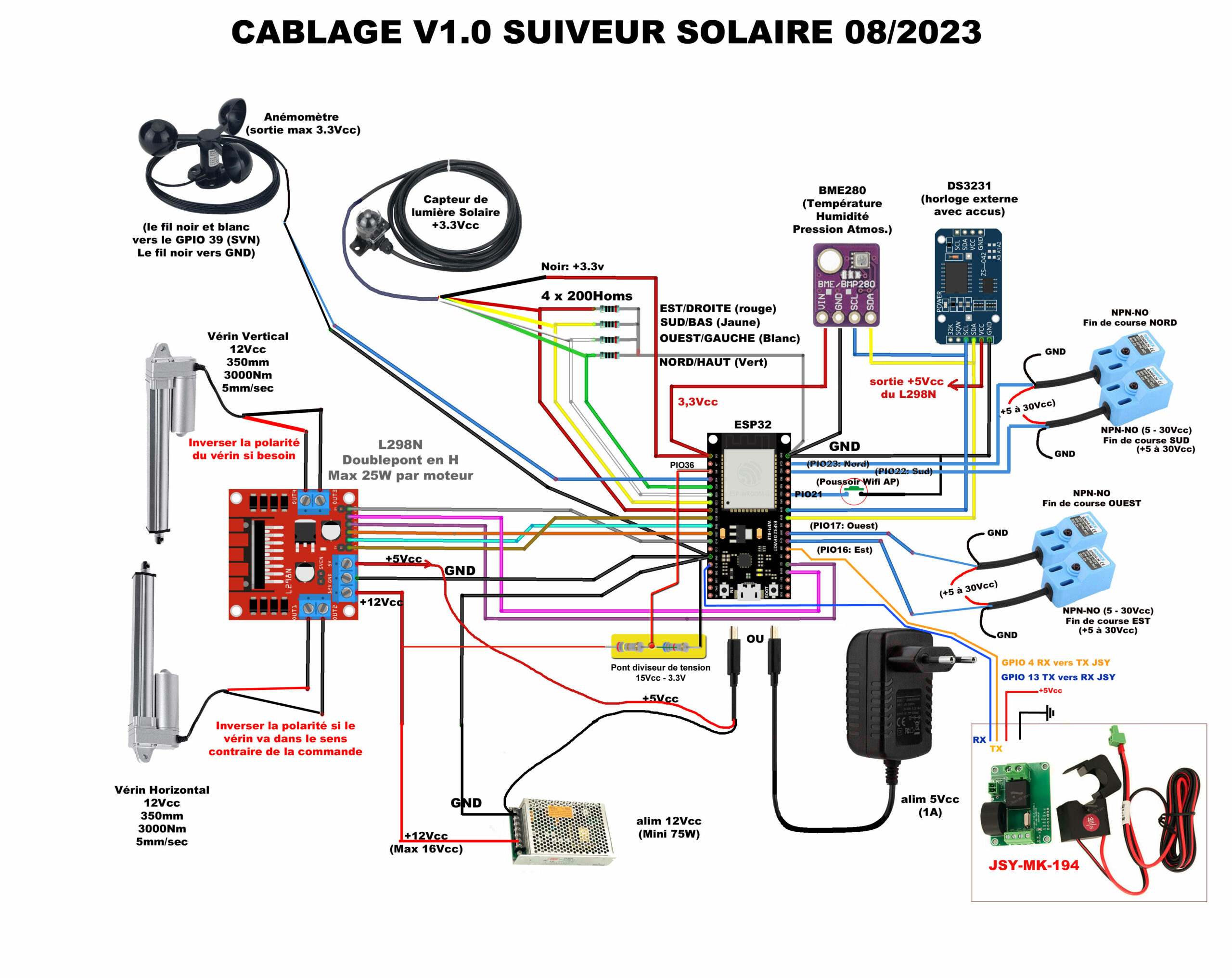
Module L298N pour la gestion des moteurs/Vérins.
Le module L298N est un double pont en H qui permet de piloter deux moteurs/vérins avec une tension d’alimentation de 5 à 35Vcc et 2Amp par moteur.
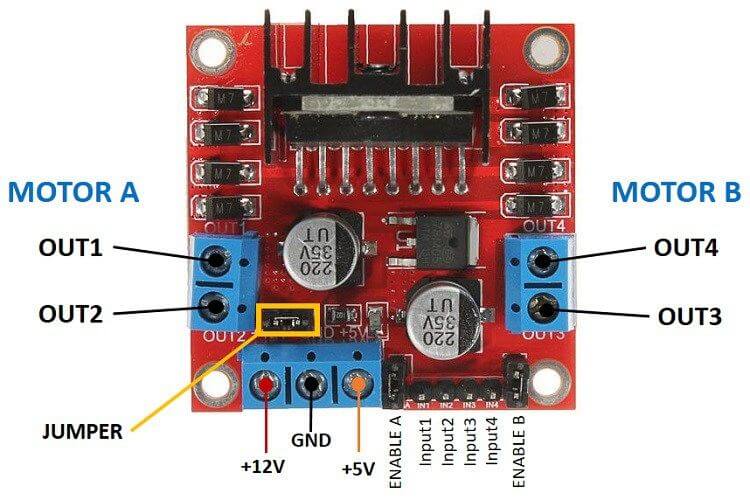
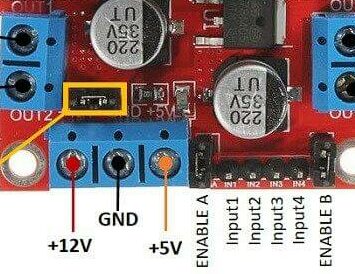
NB : Si le jumper n’est pas en place, il te faudra alimenter le L298N avec une alimentation extérieure de 5Vcc. Pour plus d’informations concernant ce module:
Il existe sur internet plein d’exemples d’utilisation du L298N avec Arduino ou ESP32.
Il peut fournir une tension de 5Vcc si le Jumper (en jaune sur la photo) est en place et peut alimenter l’ESP ou d’autres modules 5Vcc de faible consommation.
Le +12Vcc (jusqu’à 35Vcc) provient d’une source extérieure pour alimenter les moteurs ou vérins (Batterie 12Vcc ou alim 230V-12Vcc). En 18 mois d’utilisation quotidienne sur mon traqueur équipé de deux vérins 25W chacun, aucune panne ni surchauffe.
Si les vérins demandent plus de 25W chacun, il faudra adapter la partie puissance en remplaçant le module L298N par deux modules BTS7960 qui est un pont en H de 30A par moteur et par module. L’idée est de conserver le contrôle de la vitesse. Tu peux aussi installer des relais SSR de 100A mais tu perds le contrôle de la vitesse. Idem avec d’autres relais de puissance pouvant être déclenchés par une tension de 3.3Vcc.
Selon le type de relais, tu peux piloter des moteurs en courant continu ou en courant alternatif mais sans contrôle de leur vitesse de rotation.
NB: Le contrôle de la vitesse pour réaliser une rampe d’accélération ou de décélération, n’est pas utile si les moteurs ou vérins sont équipés de réducteur importants. Par expérience je peux dire que des déplacements lents sont plus appropriés pour un traqueur. Les alignements gagnent en précision, les vérins forcent moins et consomment moins. La durée de vie de toutes les pièces en mouvement est ainsi prolongée.
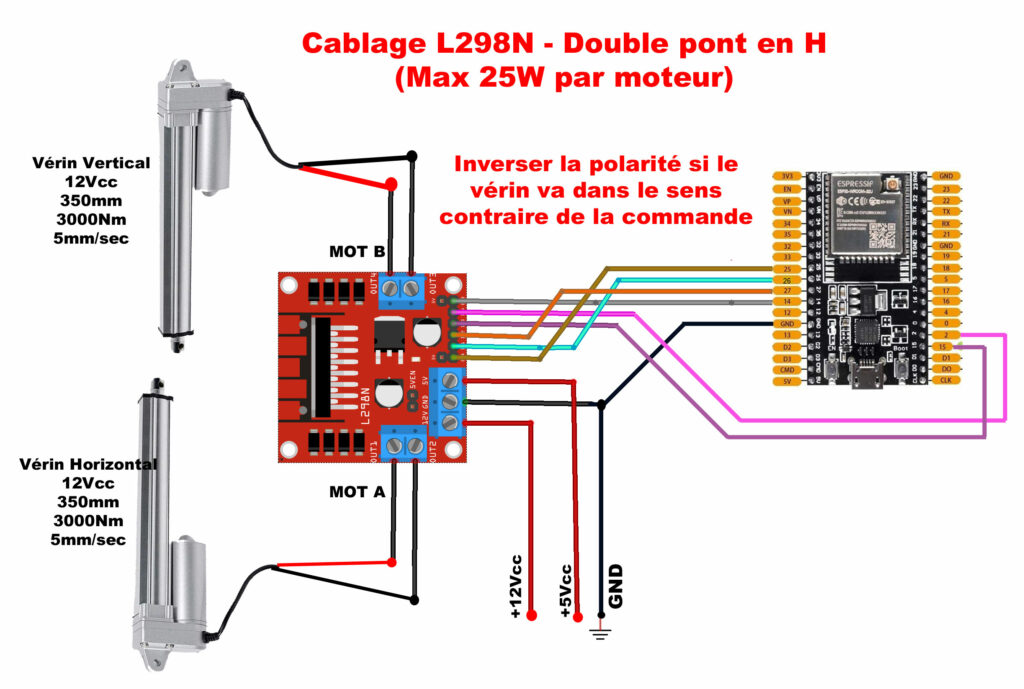
Connexions ESP32 et L298N.
Identifie bien le cheminement des câbles par leur couleur pour connecter les bons GPIO de l’ESP au broches du L298N. Le branchement des moteurs n’a pas de polarité. Si le vérin tourne dans le mauvais sens, par exemple, s’il pousse au lieu de tirer, inverse le branchement des fils du vérin.
| Broches L298N | GPIO ESP32 | A (Azimut) – B (Elévation) |
|---|---|---|
| ENABLE A | 25 | Variation vitesse Moteur A |
| Input 1 | 26 | Vers la droite (Ouest) si HIGH |
| Input 2 | 27 | Vers la gauche (Est) si HIGH |
| Input 3 | 15 | Vers le haut (Nord) si HIGH |
| Input 4 | 2 | Vers le bas (Sud) si HIGH |
| ENABLE B | 14 | Variation vitesse Moteur B |
Respecte bien l’ordre de la connexion des Vérins sur le L298N:
- Moteur A => alignement du traqueur sur l’Azimut du Soleil (Est – Ouest).
- Moteur B => alignement du traqueur sur la hauteur/élévation du Soleil (Nord – Sud).
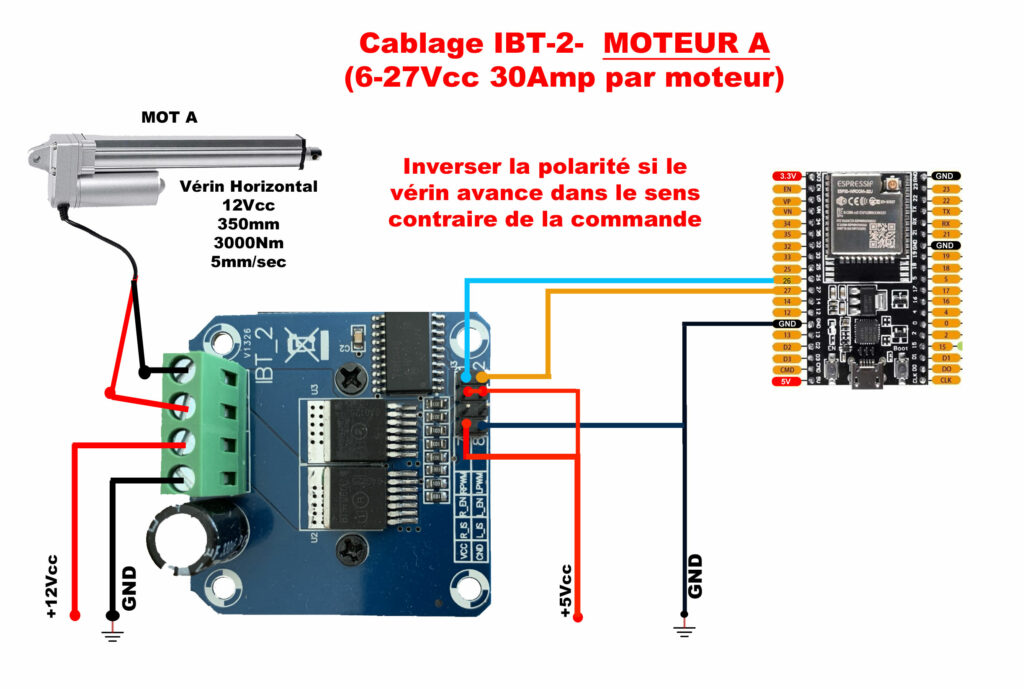
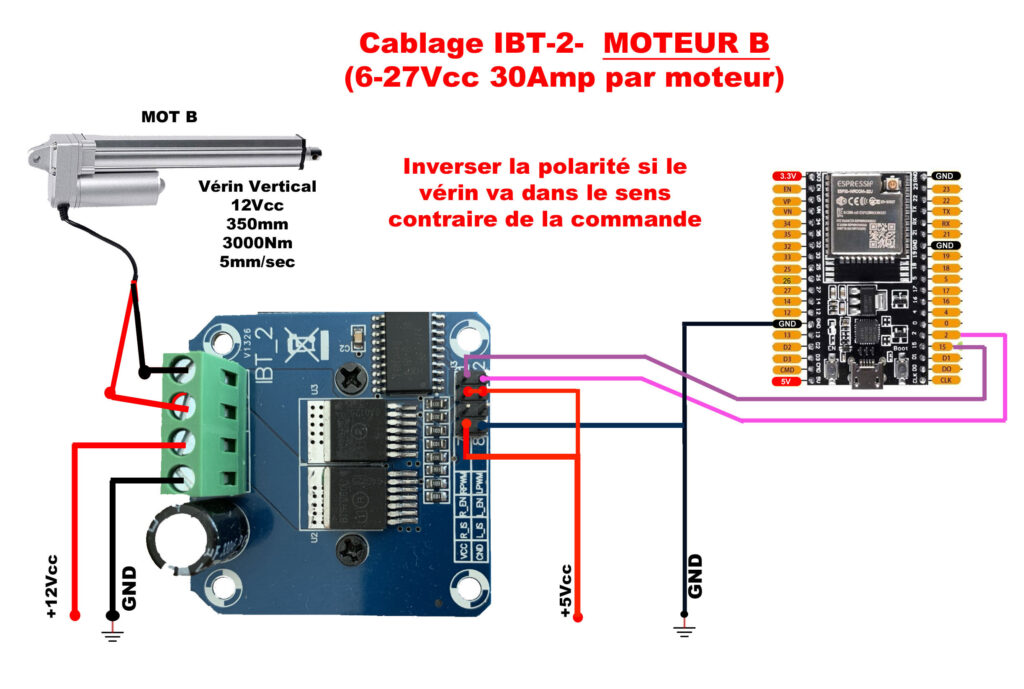
Module IBT-2 (un module par moteur)
Le module IBT-2 est un pont en H qui ne pilote qu’un seul moteur à la fois. L’IBT-2 accepte une tension d’alimentation des moteurs de 6 à 27Vcc en délivrant 30A en continue.
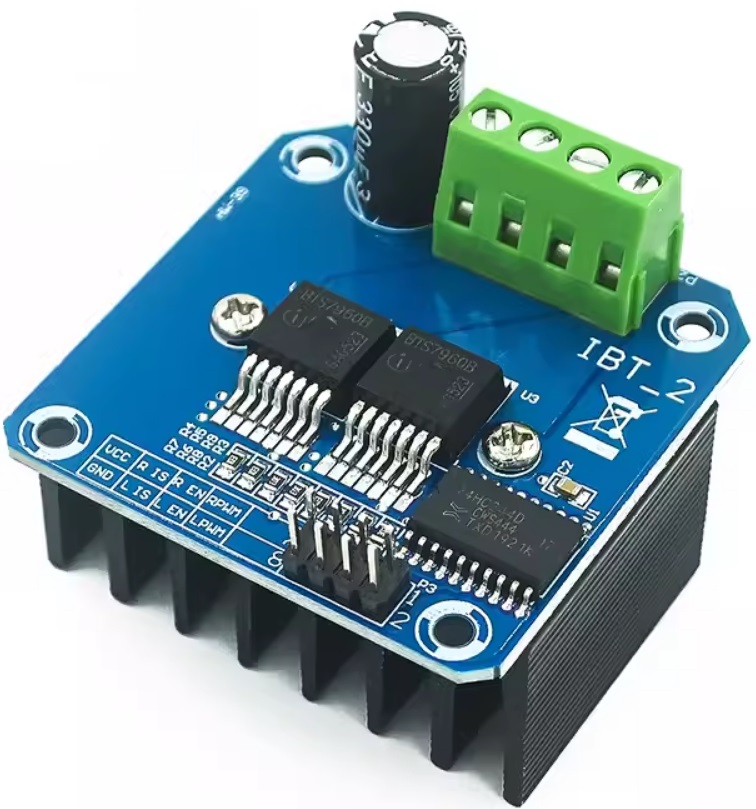
Si ton Traqueur gère deux axes (Azimut et Élévation), il faudra utiliser deux modules. Un par axe. Les deux modules doivent être du même type.
L’IBT-2 à besoin d’une alimentation extérieure de 5Vcc pour alimenter son circuit logique (contrôle) qui est indépendante de l’alimentation des moteurs. Pour plus d’informations concernant ce module:
Connexions ESP32 et IBT-2.
Contrôle bien le cheminement des câbles par leur couleur pour connecter les bons GPIO de l’ESP au broches du module. Le branchement des moteurs n’a pas de polarité. Si le vérin tourne dans le mauvais sens, par exemple, s’il pousse au lieu de tirer, inverse le branchement des fils du vérin.
| Broches IBT-2 | GPIO ESP32 | A (Azimut) – B (Elévation) |
|---|---|---|
| RPWM (MotA) | 26 | Vers la droite (Ouest) |
| LPWM (MotA) | 27 | Vers la gauche (Est) |
| RPWM (MotB) | 15 | Vers le haut (Nord) |
| LPWM (MotB) | 2 | Vers le bas (Sud) |
| R_IS et L_IS | – | Non connectés |
| R_ES et L_ES | – | +3.3Vcc ou +5Vcc |
| GND | GND | GND |
Respecte bien l’ordre de la connexion du Vérin sur le module de puissance:
- Moteur A => alignement du traqueur sur l’Azimut du Soleil (Est – Ouest).
- Moteur B => alignement du traqueur sur la hauteur/élévation du Soleil (Nord – Sud).
Module PWM H-Bridge – MOSFET IRF3205 (un module pour 2 moteurs)
Le module PWM H-Bridge – MOSFET IRF3205 est un double pont en H qui pilote deux moteurs simultanément. Il accepte une tension en entrée de 12 à 24Vcc 2x10A.
Le circuit logique de ce module doit être alimenté par une alimentation extérieure de 5Vcc. Pour plus d’informations concernant ce module:
Connexions ESP32 et PWM H-Bridge – MOSFET IRF3205
Identifie bien le cheminement des câbles par leur couleur pour connecter les bons GPIO de l’ESP au broches du module. Le branchement des moteurs n’a pas de polarité. Si le vérin tourne dans le mauvais sens, par exemple, s’il pousse au lieu de tirer, inverse le branchement des fils du vérin.
| Broches MOSFET IRF3205 | GPIO ESP32 | A (Azimut) – B (Elévation) |
|---|---|---|
| DIR1 (MotA) | 26 | Vers la droite (Ouest) |
| PWM1 (MotA) | 27 | Vers la gauche (Est) |
| PWM2 (MotB) | 15 | Vers le haut (Nord) |
| DIR2 (MotB) | 2 | Vers le bas (Sud) |
| +5V | – | +5Vcc |
| GND | GND | GND |
Respecte bien l’ordre de la connexion des Vérins sur le module de puissance:
- Moteur A => alignement du traqueur sur l’Azimut du Soleil (Est – Ouest).
- Moteur B => alignement du traqueur sur la hauteur/élévation du Soleil (Nord – Sud).
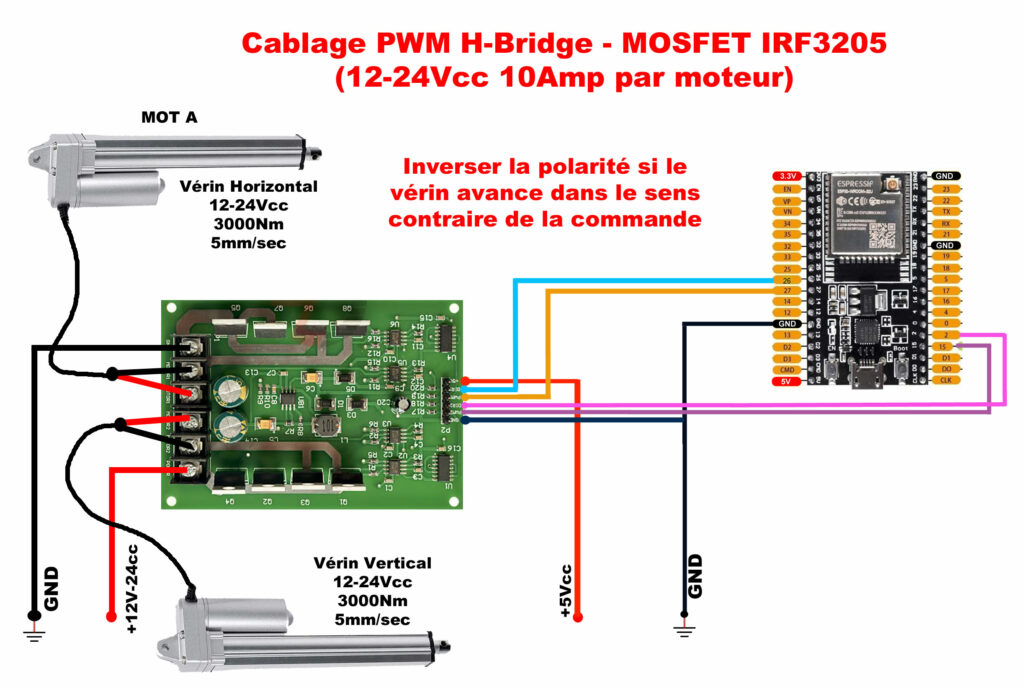
NB: Toutes les connexions avec les GPIO de l’ESP32, le GND, l’alimentation +5Vcc et le 12-24Vcc doivent impérativement être en place pour que le module fonctionne correctement. Si tu fais des tests en ne branchant les commandes que d’un seul moteur, le module ne fonctionnera pas ou de façon aléatoire.
Montage pour relais de puissances
Les relais SSR (relais solide) sont bien adaptés pour fonctionner avec les sorties GPIO en 3.3Vcc de l’ESP32. Ils peuvent avoir des sorties de 3 à 60VCC ou 24 à 380VAC. Il est possible d’ajouter ce que l’on veut en sortie pour commander des moteurs puissants.
NOTA : ce montage ne permet pas de contrôler la vitesse de rotation des moteurs par l’ESP. Les relais SSR ne sont pas conseillés pour des commandes nécessitant des contacts secs avec une logique On/Off de par leur conception. Il faut s’orienter vers des SSR “signal” type photoMOS/OptoMOS (sortie MOSFET), adaptés aux entrées de commande.

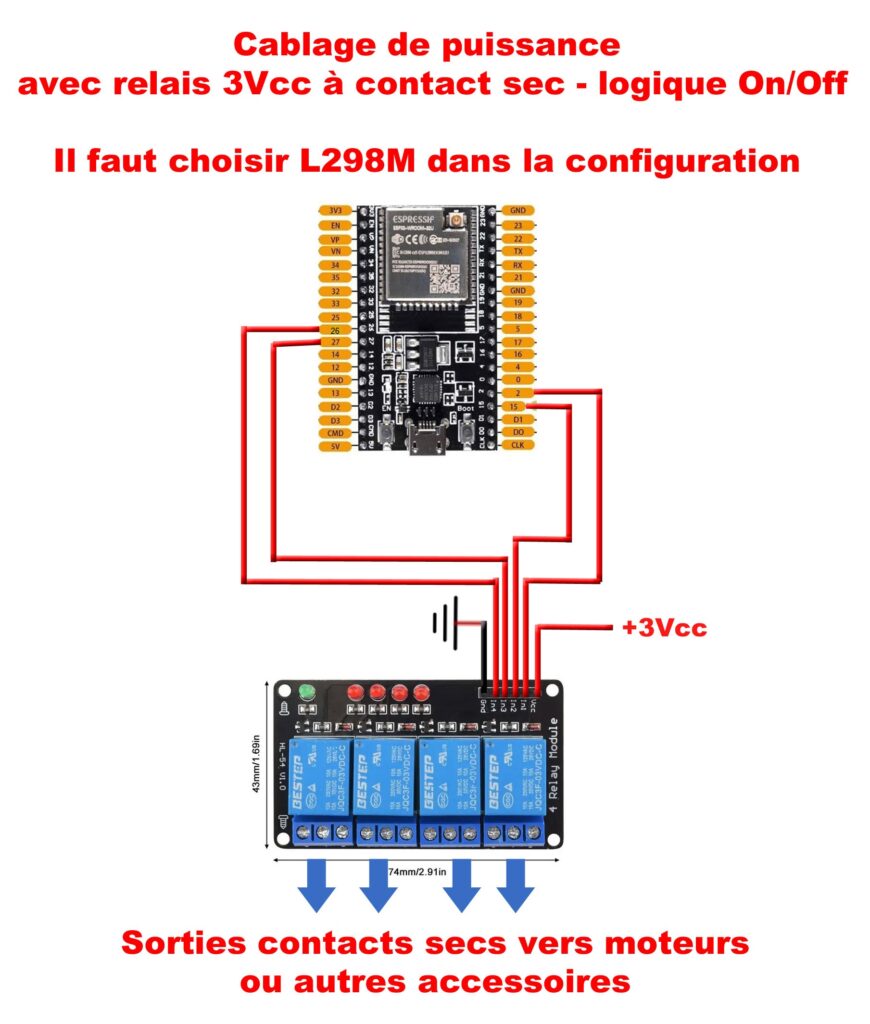
Tu peux trouver des cartes prêtes à l’usage de 2€ à 10€ sur internet avec une tension de commande de 3.3V parfaitement adaptée aux GPIO de l’ESP32.
NOTA : ces relais mécaniques sont parfaitement adaptés aux entrées de commande logique On/Off.
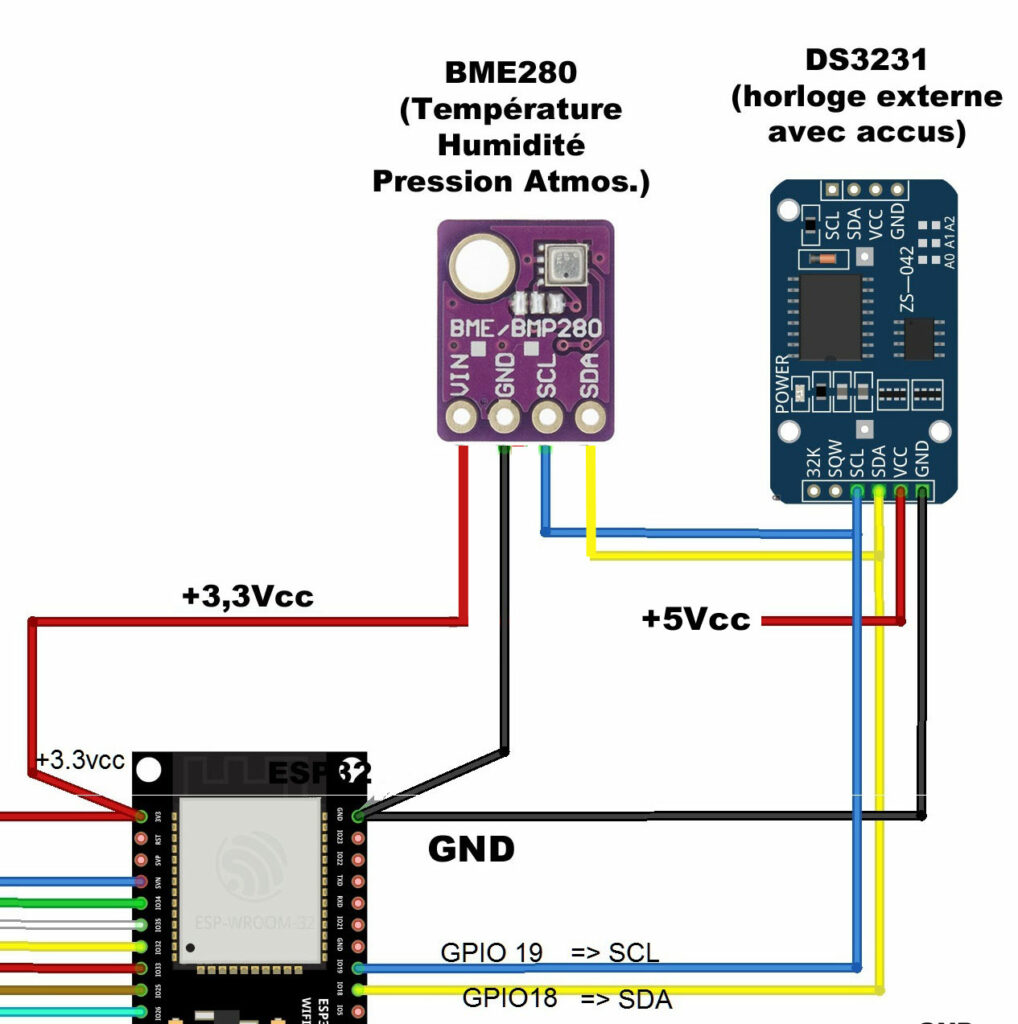
Le module horloge externe DS3231 (I2C)
Le bus I2C est un protocole qui permet de communiquer avec plusieurs module connectés aux mêmes broches SCL et SDA de l’ESP32. Les modules DS3231 et BME280 sont équipés de ce protocole.
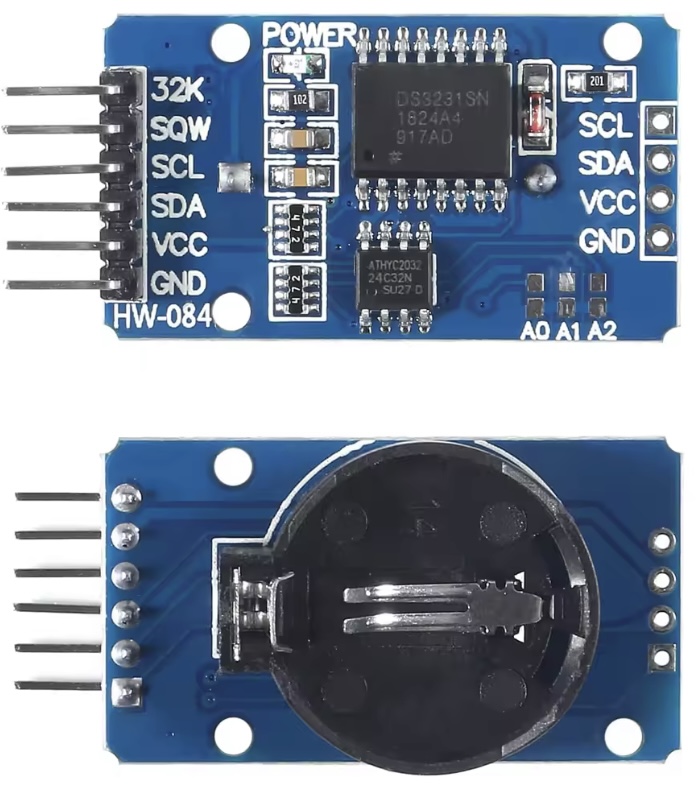
La LIR2032 est rechargée par le module DS3231 qui gère sa charge et décharge dés qu’il est alimenté.
le module DS3231permet de conserver la date et l’heure en cas de coupure de l’alimentation si tu choisis de ne pas connecter ton traqueur au wifi de ta Box.
il est alimenté par l’ESP32 en 3,3Vcc ou en 5Vcc en fonctionnement normal. En cas de coupure la pile rechargeable LIR2032 permet à l’horloge du module de continuer à fonctionner pour transmettre la date et l’heure à l’ESP32 lors de son redémarrage. Le logiciel du Traqueur ne fonctionne pas s’il n’a pas une source de temps.

La tension de la pile LIR2032 est de 3.6V (jusqu’à 4.2V en charge) ce qui signifie que sa recharge n’est pas correctement assurée si le module est alimenté en 3.3Vcc. Il est donc recommandé de l’alimenté avec une source de 5Vcc extérieure à l’ESP.
IMPORTANT: n’utilise pas une pile CR2032. Elle n’est pas rechargeable et pourrait causer des dommages à ton module.
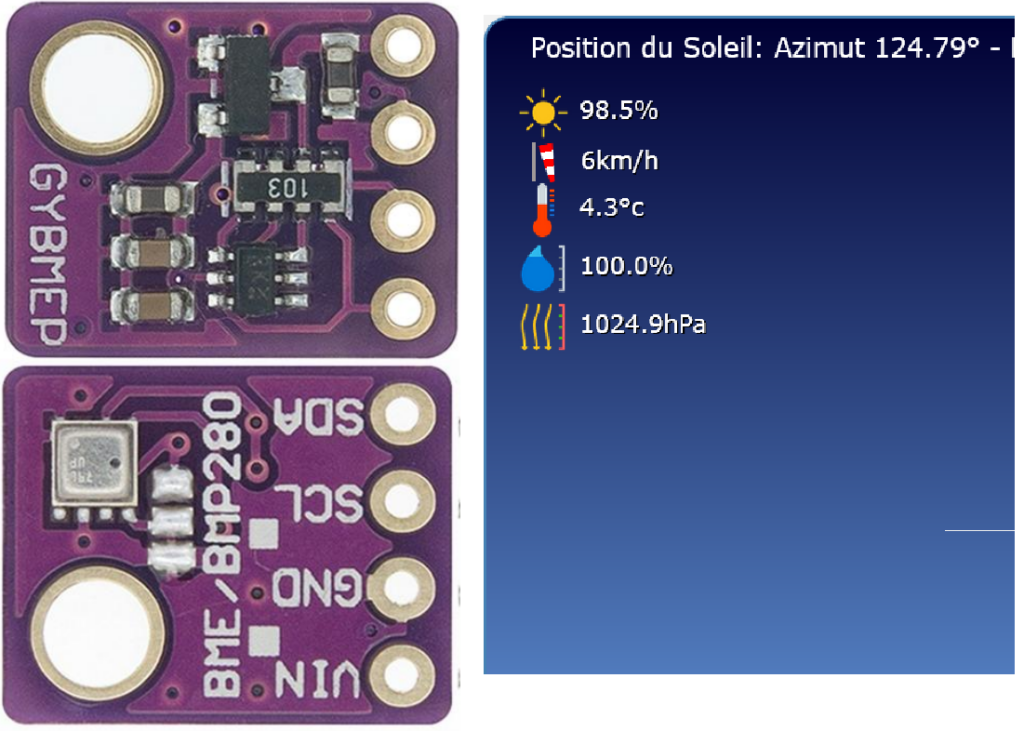
Le module météo BME280.
Ce module n’est pas indispensable au fonctionnement du Traqueur mais il apporte un petit côté sympa avec l’affichage de la température, le taux d’humidité et la pression atmosphérique.
Il existe en de nombreuses versions, ce qui rend parfois sa configuration mémoire avec l’ESP un peu délicate.
Il est alimenté soit en 5Vccc, soit en 3.3Vcc mais pour chaque tension, c’est un module différent. Il y a une version 5V et une version 3.3V.
Le module de détection d’Azimut et d’Elevation.

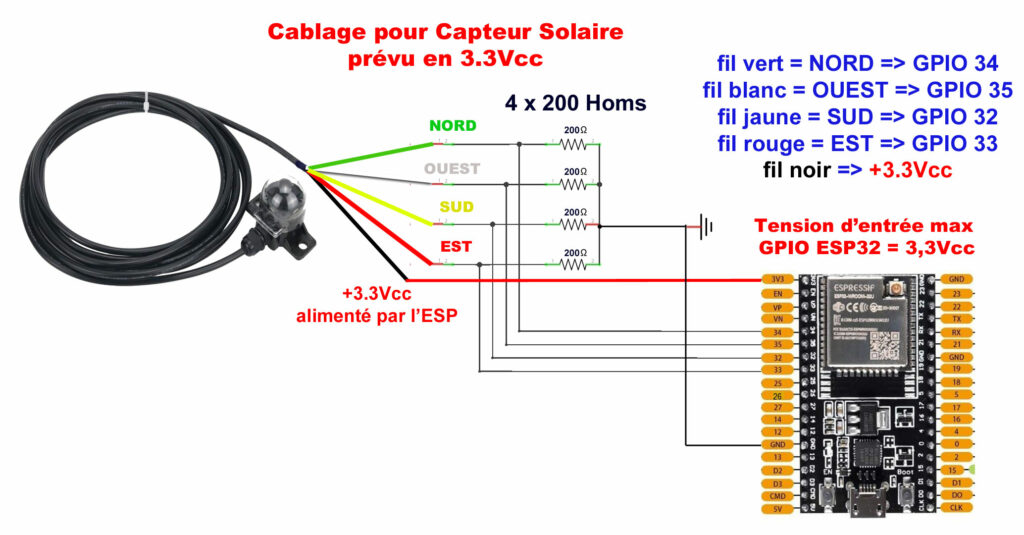
Ce module fonctionne avec la lumière qui fait varier la valeur de plusieurs LDRs (résistances sensibles à la lumière). Il va transmettre à l’ESP des tensions sur chaque GPIO connecté. Selon la position du traqueur par rapport au Soleil, l’ESP alimente les vérins dans un sens ou l’autre.
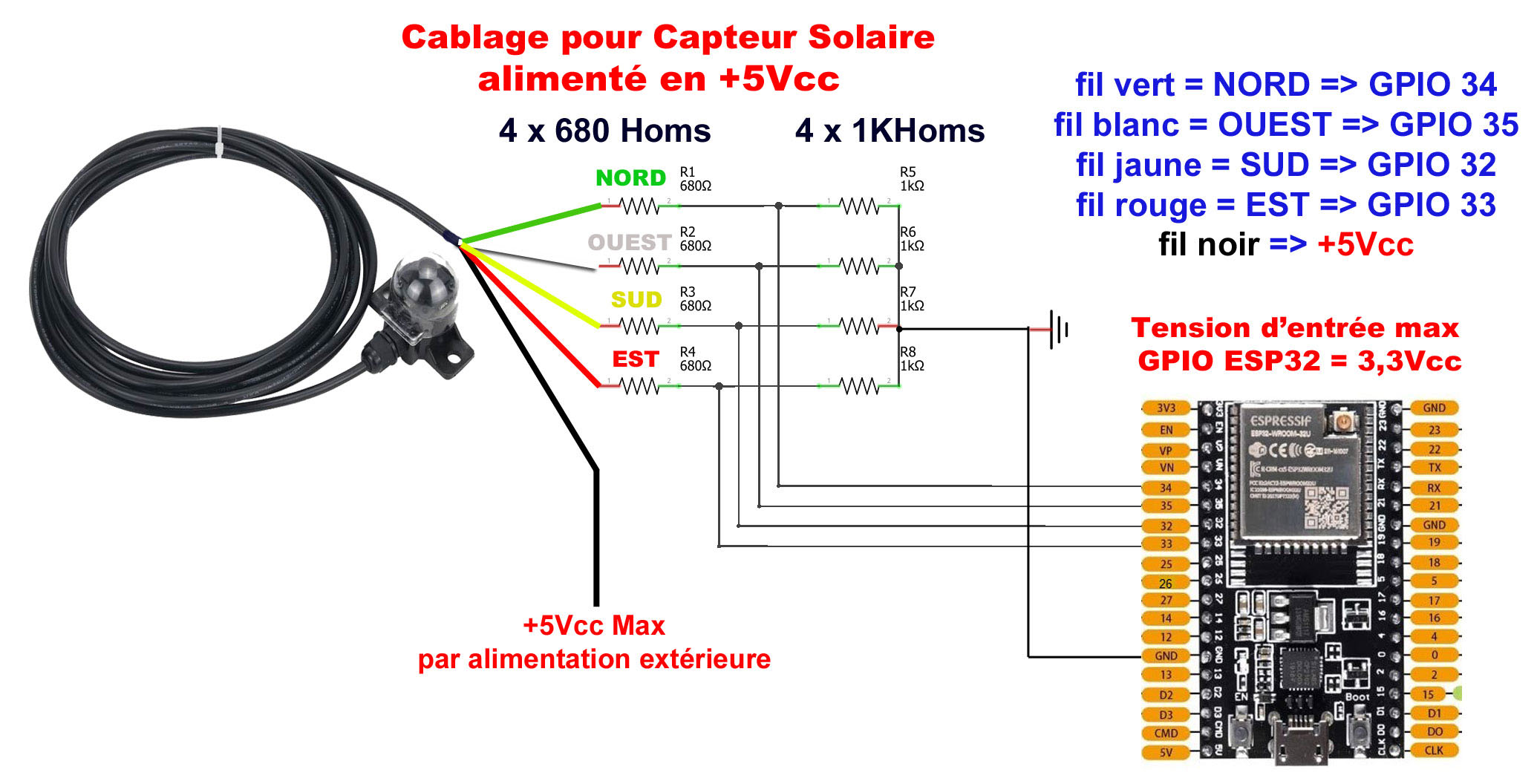
On trouve certains de ces modules qui fonctionnent en 3.3Vcc et d’autres en 5Vcc à +12Vcc. Ils ont la même apparence extérieure. Il faut donc être vigilant au moment de l’achat car le schéma de câblage n’est pas le même.
Version alimentée en 3,3Vcc
Version alimentée en 5V
L’ESP n’accepte que 3.3Vcc maximum sur ses broches GPIO. Il faut donc réaliser un pont diviseur de tension avec plusieurs résistances pour passer de 5v à 3.3V et rester dans sa plage de fonctionnement. Si tu alimentes ton capteur en 12Vcc, il faudra recalculer le pont diviseur.
IMPORTANT : Quelque soit le type de capteur lumineux, il est impératif qu‘il soit alimenté avec une tension très stable (3.3V ou 5V ou 12V). La moindre variation faussera toutes les mesures de ton capteur et peut engendrer des alignements aléatoires. Par exemple si le fonctionnement des vérins entraine une chute de tension, et que le capteur utilise la même alimentation, tu auras des aberrations dans les alignements.
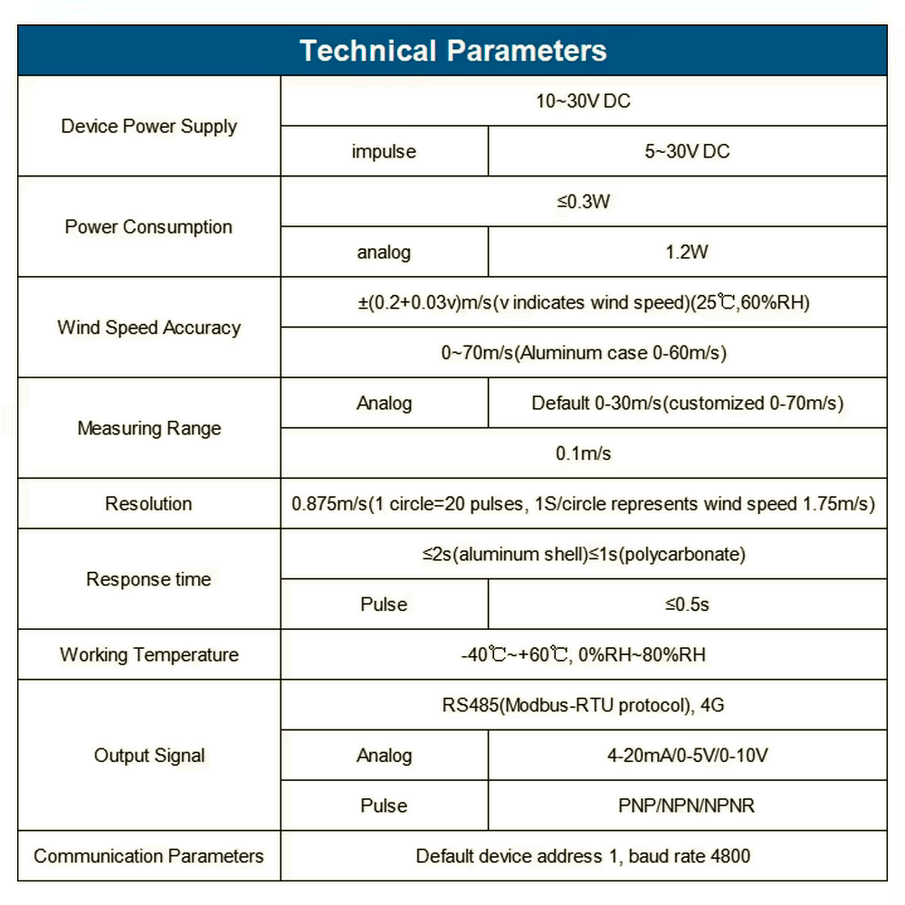
Le module Anémomètre (vitesse du vent).
Ici encore, on se retrouve avec plusieurs options. Il existe un grand nombre de modèles d’anémomètres très différents autant dans la tension d’alimentation que dans le protocole de communication avec le contrôleur (ESP32 dans notre cas).
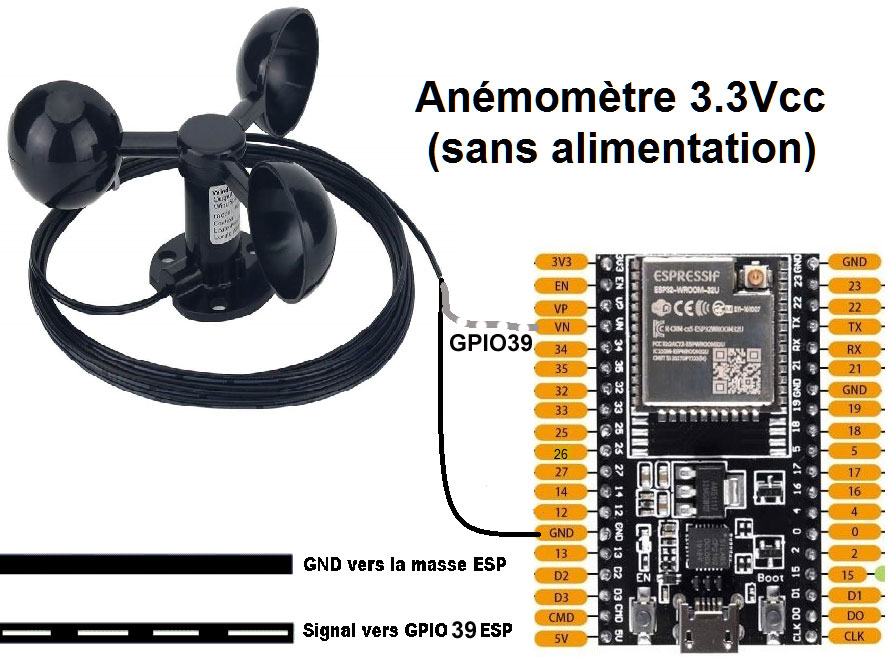
Un fil sur la masse et l’autre au GPIO 39 de l’ESP
J’ai choisi un capteur simple en 3.3Vcc qui me permet de mettre le Traqueur en position de sécurité si le vent souffle trop fort. Par ailleurs, même avec seulement deux panneaux, l’anémomètre reste nécessaire même si la structure du Traqueur est suffisamment rigide et bien fixée au sol. Pour un mât de 110cm en tube D=60mm et épaisseur 3mm le Vent max est d’environ 60Km/h avant flexion. Consulter les conseils de structure sur la page mécanique.
Sur l’anémomètre en 3.3Vcc, il n’y a que deux fils à connecter directement sur l’ESP comme indiqué ci-dessus. Ce module est simple car il produit une tension de plus en plus forte en fonction de la vitesse de rotation des trois coupelles de l’anémo.
IMPORTANT: Si tu utilises un anémomètre en +5Vcc ou 12Vcc, il faudra réduire la tension du signal de sortie par un pont diviseur de tension pour ne pas dépasser 3.3Vcc.
Vérifie également que ton anémomètre produit bien une tension en fonction de la vitesse de rotation des coupelles. Certains produisent un signal en sortie qui utilise les protocoles RS485(Modbus-RTU), d’autres des milli-ampères (4-20mA) ou des Volt (0-5V, 0-10V) et d’autres des pulses (PNP, NPN, NPNR). Le logiciel n’accepte que les anémomètres qui génèrent une tension maximum de 3,3Vcc.
Relie le GPIO12 à la masse pour éviter l’affichage de valeurs farfelues si tu n’as pas d’anémomètre connecté à ton ESP.
Les contacts de fin de course.
Si tu utilises des vérins linéaires, les fins de courses sont déjà intégrés dans leur mécanisme. Néanmoins, si ton traqueur nécessite des contacts fins de course, le logiciel gère les deux axes mais tu peux n’en utiliser qu’un seul.
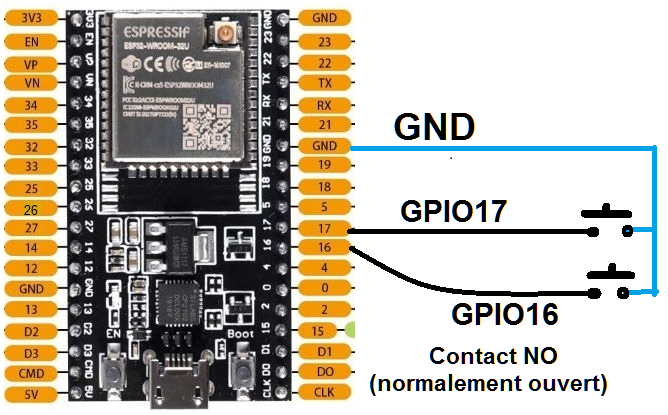
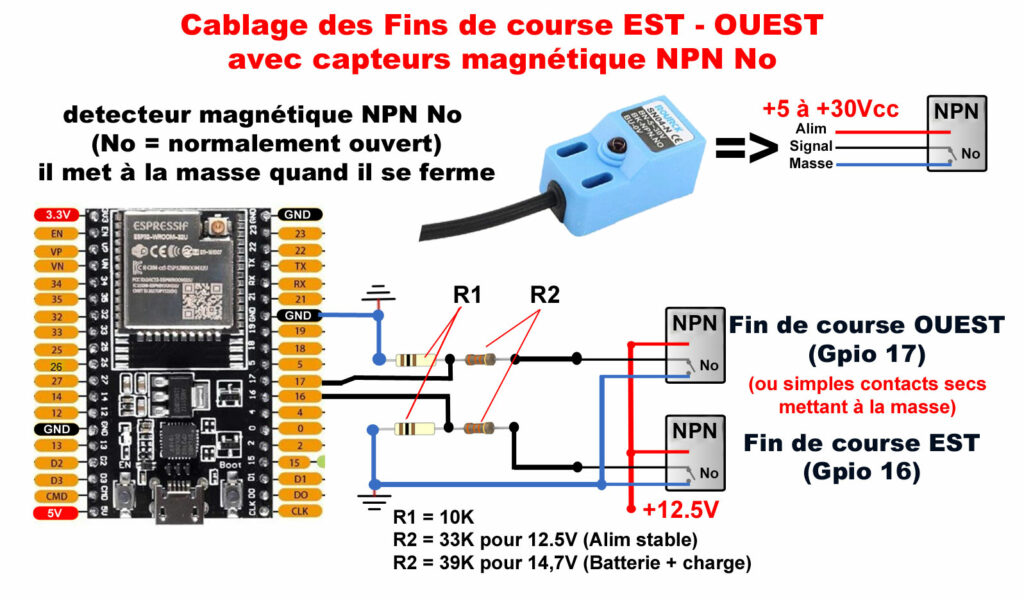
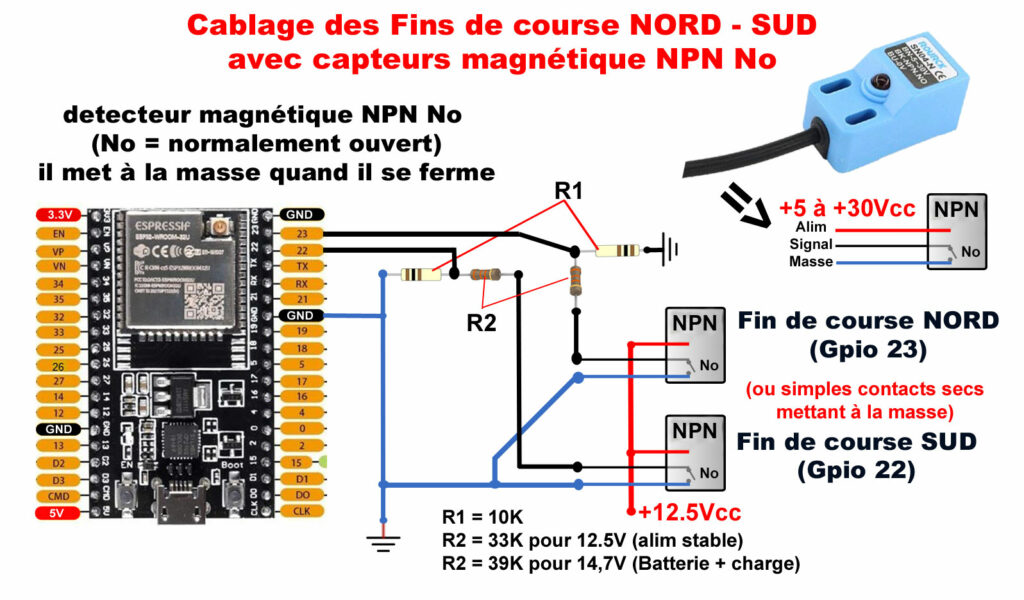
Tu as la possibilité d’utiliser différents types de contact de fin course sachant que le logiciel reconnaît la fin de course lorsqu’un des deux GPIO est mis à la masse. Dans le cas d’une utilisation de contact sec (micro switch), le montage est simplifié. Il suffit de connecter une borne à la masse et l’autre au Gpio concerné.
Tu peux utiliser des capteurs magnétiques/inductifs en guise de fin de course. Toutes les possibilités sont envisageables tant que le fin de course normalement ouvert met à la masse quand il se ferme. Dans la conception du PCB (circuit imprimé) une solution est proposée pour utiliser des capteur NPN, ou PNP No (normalement ouvert/normaly open) ou Nc (normalement fermé/normaly close). Un article sera dédié au PCB et les différentes configurations.
Module JSY-MK-194G pour mesurer la production solaire.
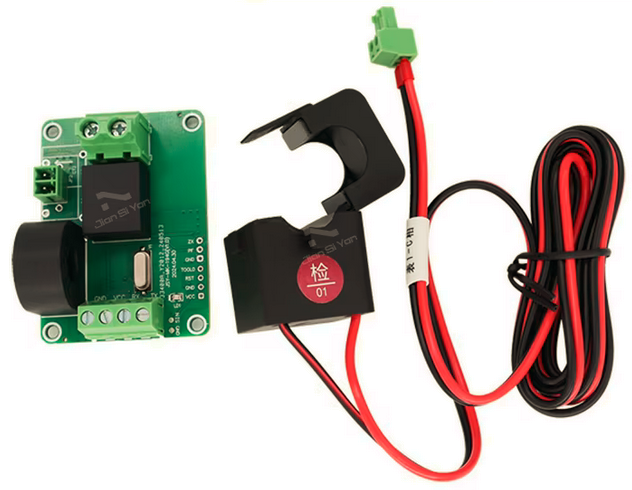
Module de mesure d’énergie AC monophasé (tension, courant, puissance, énergie, facteur de puissance, fréquence).
Communication série UART TTL, compatible ESP32.
Il fonctionne avec deux transformateurs de courant externe (CT) pour une mesure isolée et fiable.

Il est bien adapté au suivi de production ou de consommation électrique. Il possède une mémoire interne utilisable par l’ESP.
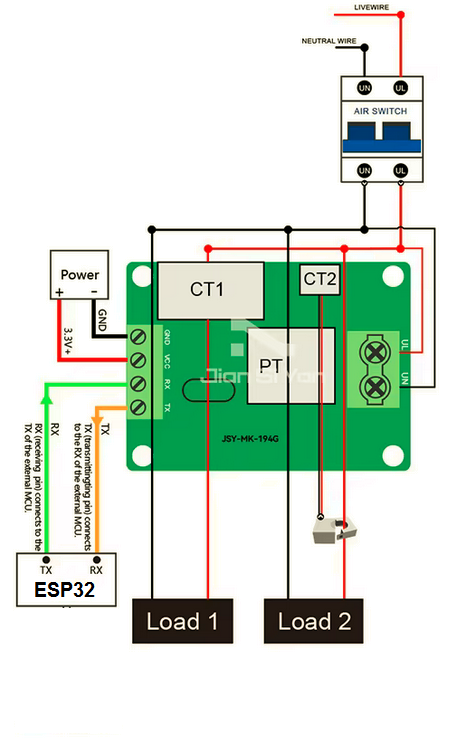
| ESP32 | JSY-MK-194G |
|---|---|
| GPIO 4 (RX) | → TX |
| GPIO 13 (TX) | → RX |
| GND | → GND |
| 5V (ou 3.3V selon modèle) | → VCC |
Le JSY posséde deux canaux que le programme exploite. Il est par exemple possible d’utiliser le premier canal pour mesurer toute la production Solaire du Traqueur. Si ton Traqueur est alimenté en 12Vcc en passant par une alimentation 230V, tu peux exploiter le second canal pour mesurer la consommation électrique du Traqueur.
Pour mesurer avec le JSY, il faut faire passer la phase du circuit concerné (uniquement la phase) dans un des deux Transfo. de courant (capteurs CT). Si la production est négative, inverse le sens du fil de la phase qui passe dans la boucle du transformateur de courant.
Câblage pour la mesure du niveau de charge de la batterie.
Si tu alimentes ton Traqueur à partir d’une batterie 12V ou 24V, tu peux surveiller son niveau de charge en temps réel. Le schéma proposé est prévu pour une batterie de 12Vcc. Pour une batterie de 24V il faudra recalculer les valeurs des résistances du pont diviseur afin d’avoir toujours 3.3V en sortie du pont diviseur.
La tension maximale admise à l’entrée du pont diviseur est de 15Vcc car certains chargeur de batterie arrive parfois jusqu’à cette tension.
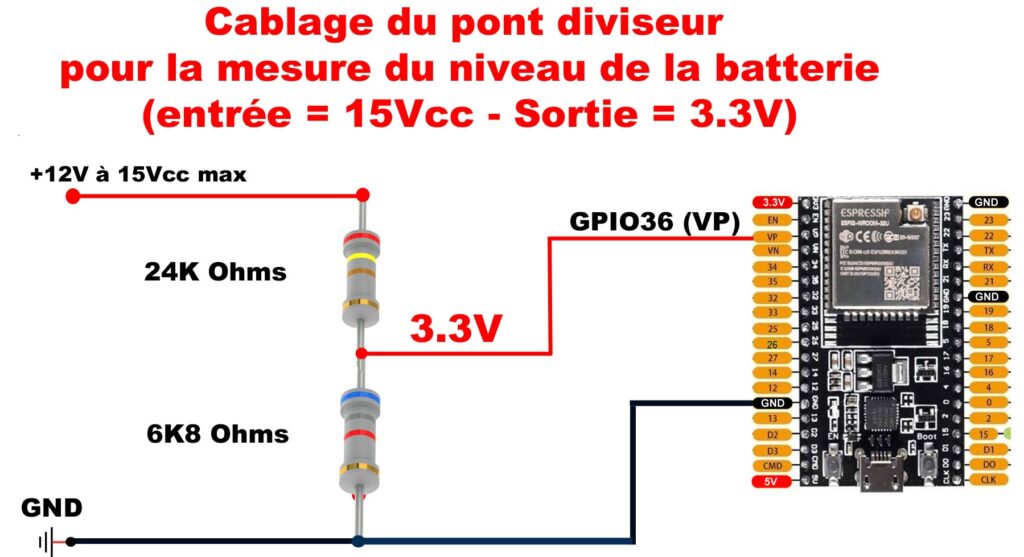
IMPORTANT: Pour une batterie de 24Vcc, le calcul doit prendre en compte une tension de 30Vcc à l’entrée du pont diviseur afin d’intégrer la tension du chargeur.
Si tu alimentes ton Traqueur avec une alimentation secteur et que tu n’utilises pas le GPIO36 pour tester la tension, l’affichage de la batterie est masqué sur la page web mais l’information remonte dans Home Assistant et indiquera 100%
Tu auras également l’information générale d’une alerte si les niveaux bas sont atteint.




Calibrage de l’ESP pour la mesure de la tension.
UNIQUEMENT POUR LES VERSIONS 9.x.x (A partir de la V10 tout se fait dans les pages web)
Cette fonction n’est opérationnelle que si tu as fait le montage des résistances en pont diviseur branché sur le GPIO36. Dans le cas contraire (montage sans résistance laissant le GPIO36 en l’air), rien ne s’affichera sur la page du Traqueur et AUCUN réglage de la tension possible. Home Assistant indiquera 100%.
- Connecte l’alimentation 12V ou 24V à la carte PCB (ou plaque d’essai) sur laquelle ton ESP est installé.
- Connecte ton ESP sur le port USB de ton ordinateur.
- Affiche la page d’installation pour accéder à la console série. ->ICI
- Avec un multimètre, mesure la tension d’alimentation (disons par exemple que tu mesures 12.83V).
- Dans la console, saisie u:12.83 (u minuscule, suivi de deux points, suivi de la tension mesurée, la décimale est un point et non une virgule).
- Tape « Entrée ». Voilà ! c’est calibré. la console indique les valeurs mesurées et corrigées.
INFO : Sur la Version 10, la tension de la batterie est utilisée pour détecter une coupure de courant secteur (230V). En cas de panne de courant, le Traqueur sauvegarde sa configuration pour le retrouver dès le retour du secteur. Cette option est activable dans la page « Capteur » et nécessite un PCB adapté (Voir page du PCB).
Soutenir
Les projets de marcosoleil.fr sont partagés librement, dans un esprit orienté vers l’autonomie technique mais aussi vers une évolution personnelle.
Cette démarche s’inscrit dans la continuité de celle de l’association Le Bon Sens de la Vie (loi 1901).
Les contributions sont versées à l’association. Si ça te parle, tu peux contribuer.