
Ce que change la Version 10.
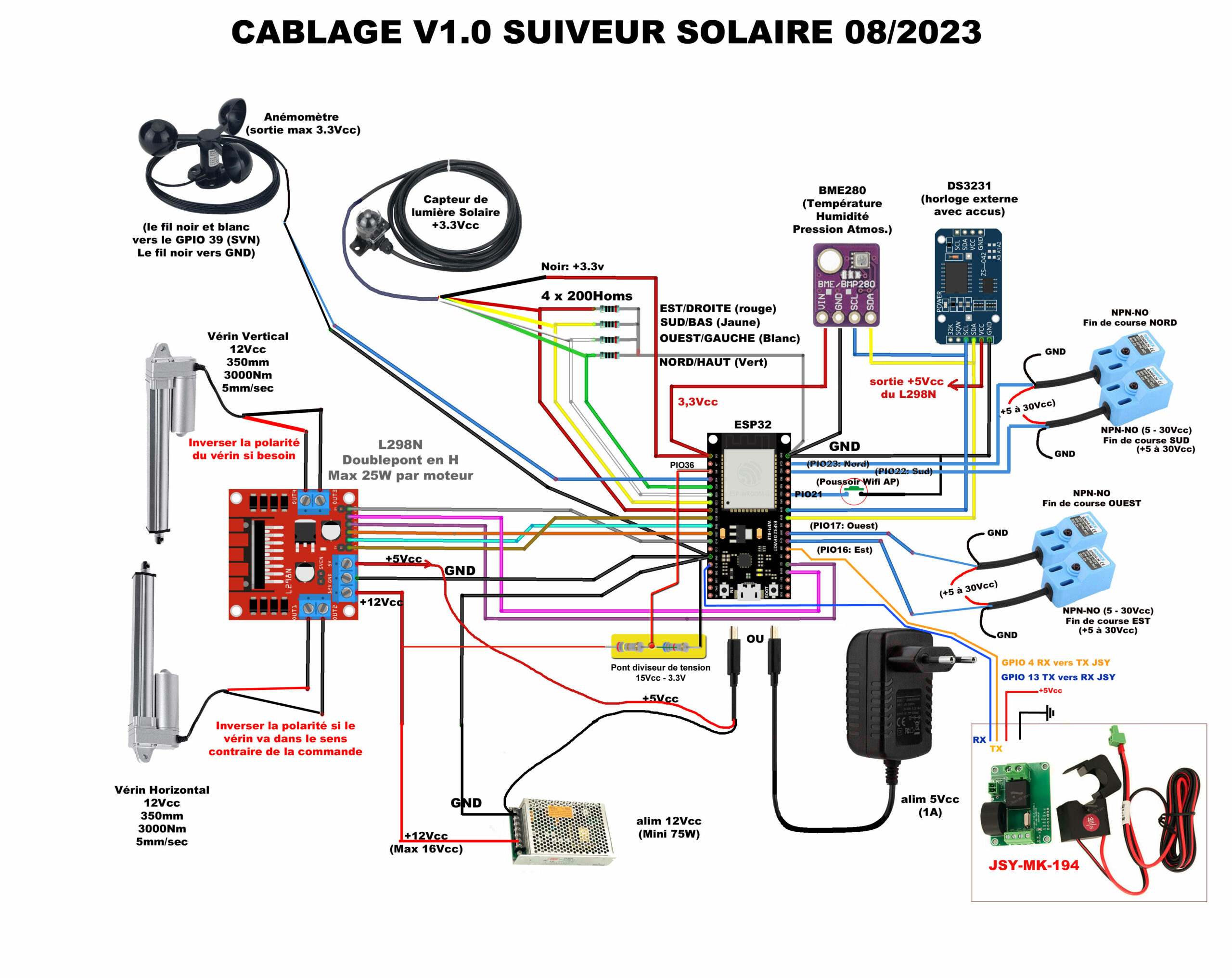
Le principe de fonctionnement du traqueur reste le même, La V10 modifie l’organisation, l’ergonomie et la logique interne. Toutes les connexions GPIO sont exactement identiques à la Version 9. Le schéma de câblage de la V10 = V9.
1️⃣ Organisation des menus, restructuration de l’interface utilisateur.
2️⃣ Un mode Maître (partage des données capteurs et date/heure),
3️⃣ Sécurité, Garage et Nuage avec choix de positions configurables,
4️⃣ Logique mécanique unifiée des réglages chronos et butées,
5️⃣ Calibrage durées et offset automatisé,
6️⃣ Gestion d’un module JSY MK194 et Page Statistiques structurée,
7️⃣ Améliorations algorithmes et charge CPU
En conditions normales (bon réglage logiciel, jour sans vent et mécanique sans jeu important), le traqueur piloté par ce système peut atteindre une précision d’environ ±2°.
À cette échelle, l’alignement est très proche du Soleil réel et la production reste optimale par grand Soleil.
La conception repose sur des éléments simples : butées mécaniques, chronométrage précis et une logique claire. On ne cherche pas la performance théorique maximale, mais une précision cohérente avec l’usage photovoltaïque pour de la conception amateur en DIY.
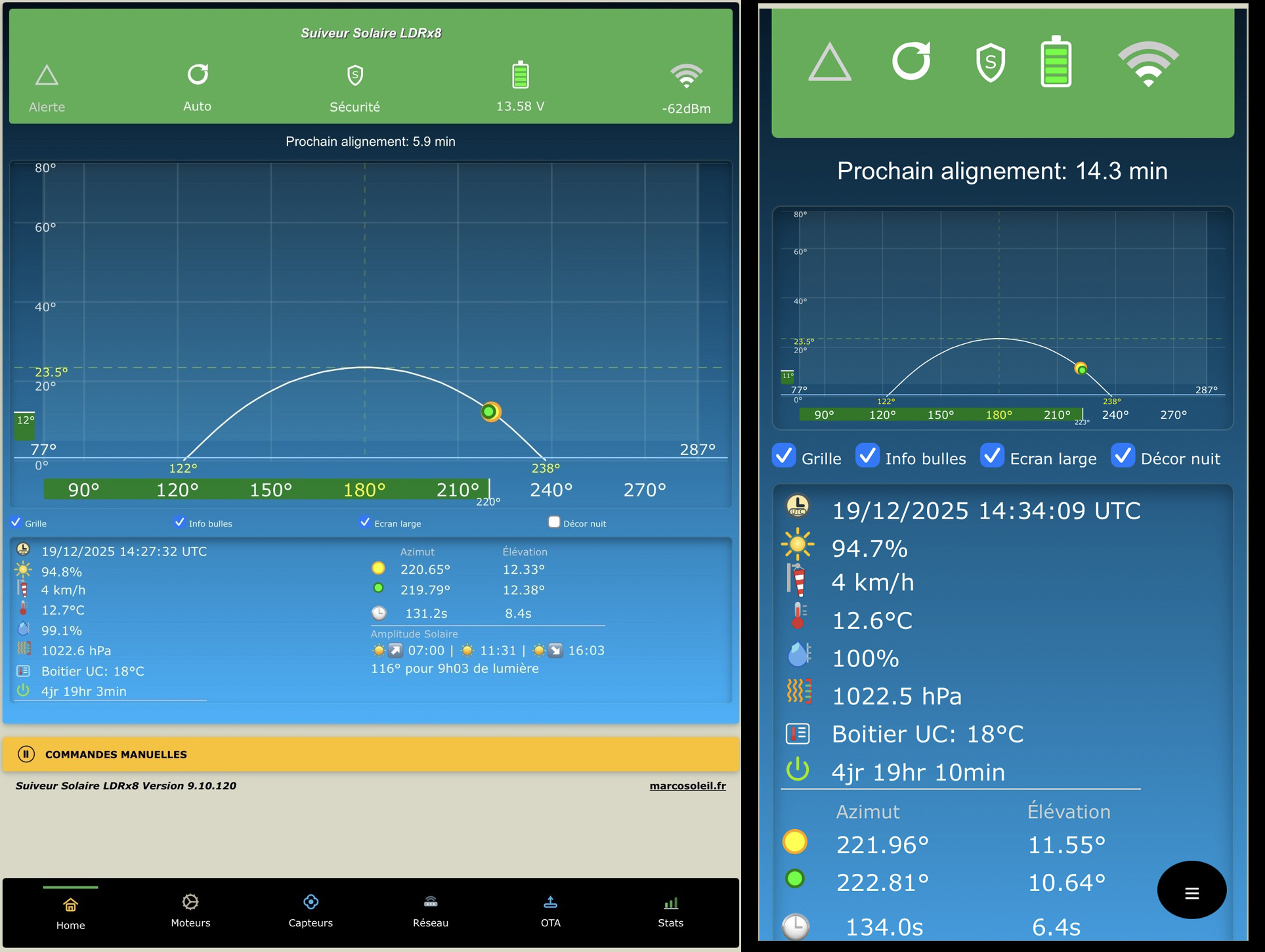
INFO : les copies des écrans, représentent une configuration avec tous les accessoires (Module météo, module JSY d’énergie solaire produite, module horloge externe DS3231, anémomètre…).
Accès rapide dans la page :
- 1) Chronologie logique (première utilisation)
- 2) Réglages des limites de débattement du Traqueur – V10
- 3) Calibrage automatique Durées + Offset – V10
- 4) Configurer les positions et verrous – V10
- 5) Configurer le type de Traqueur – V10
- 6) Coordonnées et mode de suivi solaire – V10
- 7) Configurer le réseau WiFi – V10
- 8) Accès Sécurisé au Traqueur – V10
- 9) Fonctionnement du bouton poussoir (si installé) – V10
1) Chronologie logique (première utilisation)
En arrivant sur la page d’accueil « Home », tu es connecté soit sur le WiFi du Traqueur, soit sur celui de ta Box selon la procédure que tu as suivi lors de l’installation. Si tu souhaites configurer la partie Réseaux, descends en bas de cette page pour lire quelques conseils.
1️⃣ Le Traqueur est en mode manuel par défaut.
La première action est de déplacer les vérins avec les boutons “Nord/Sud/Est/Ouest”. Un clic sur le même bouton actionne/stoppe le vérin. Le bouton du centre stoppe les deux moteurs simultanément.
Ne pas utiliser les positions mémorisées pour l’instant.
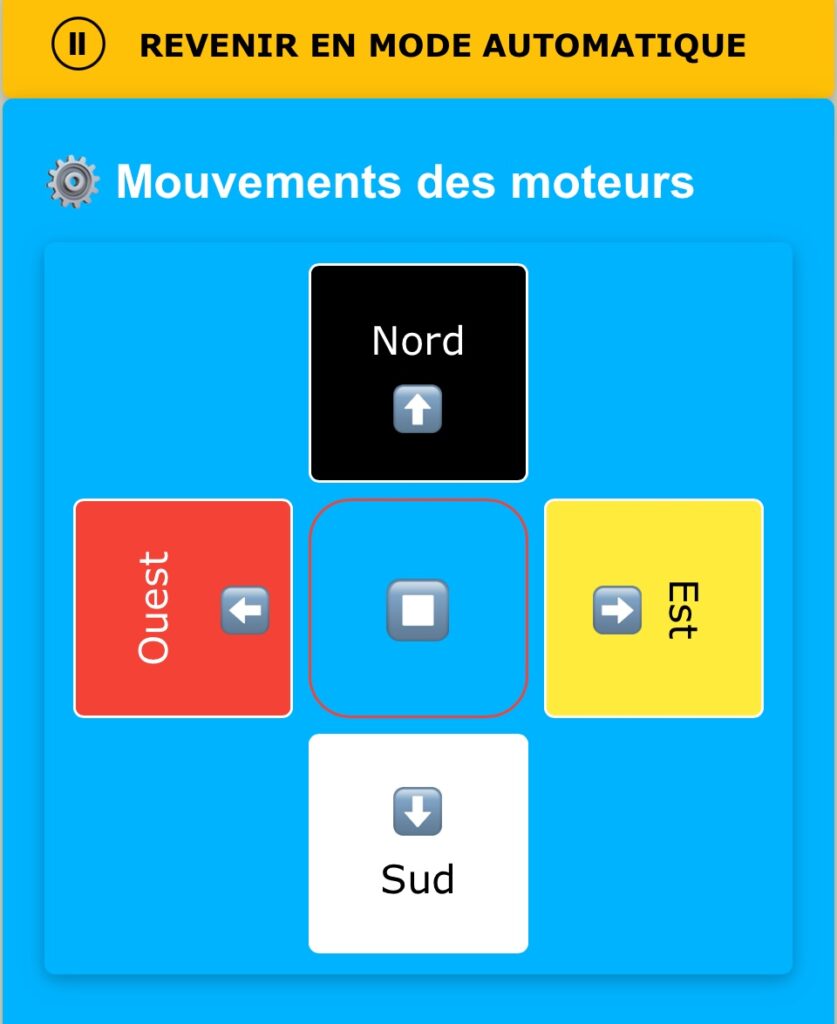
2️⃣ Amener mécaniquement le système à sa référence
Avec les commandes manuelles :
- Amener l’axe horizontal en butée Est
- Amener l’axe vertical en butée basse
Il est alors au point mécanique de départ.
➡ C’est la base physique réelle.
3️⃣ Initialiser les chronos
Une fois en butées :
- Cocher les deux chronos
- Cliquer sur “Initialiser les chronos”
À ce moment :
- Les compteurs passent à zéro
- 0 seconde correspond à la position 0/0 réelle
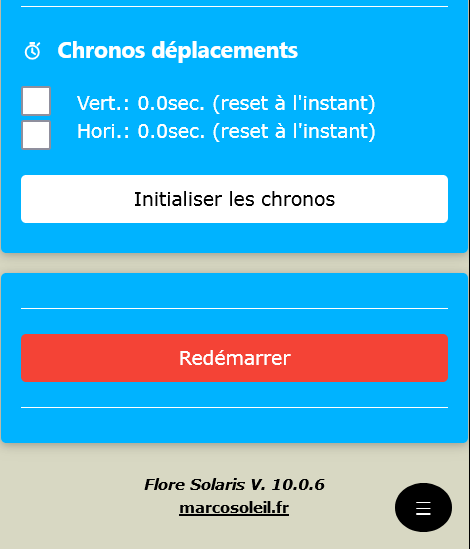
➡ La référence numérique est maintenant alignée avec la référence mécanique.
2) Réglages des limites de débattement du Traqueur – V10
Page Moteurs : Les limites Est / Ouest et Basse / Haute définissent simplement la plage mécanique autorisée.
Elles correspondent aux bornes physiques réelles du traqueur.
La mesure des limites est expliquée plus bas dans cette page.
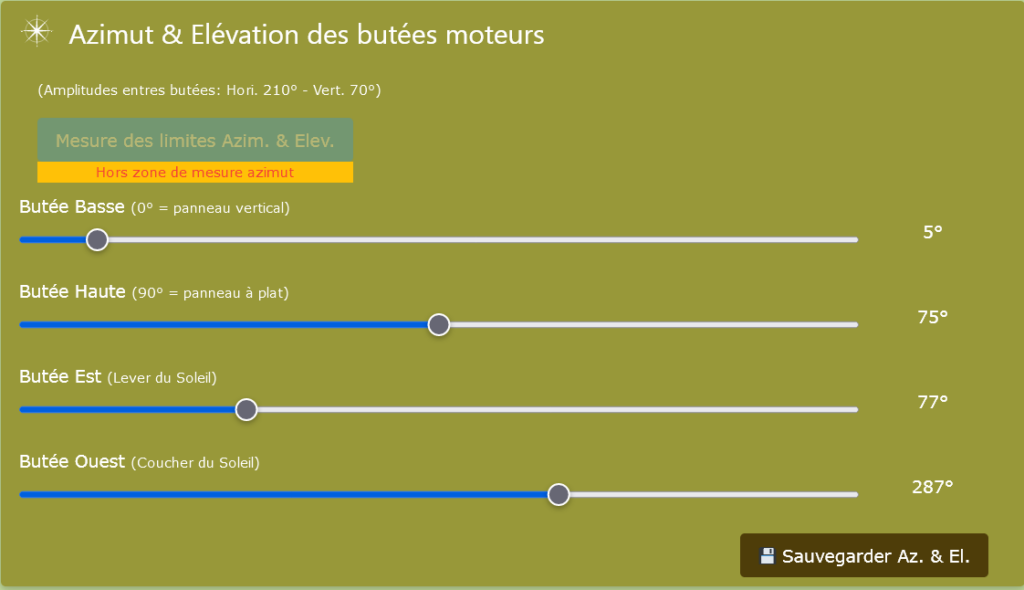
La V10 conserve le même principe. Les limites encadrent l’amplitude et servent de référence chrono.
3) Calibrage automatique Durées + Offset – V10
Prérequis (obligatoire)
- Passer en mode Manuel (le calibrage est bloqué en mode Auto).
- Le traqueur doit être initialisé et en butée Est et Basse (0/0).
- Vérifier que rien ne peut gêner la mécanique pendant les déplacements.
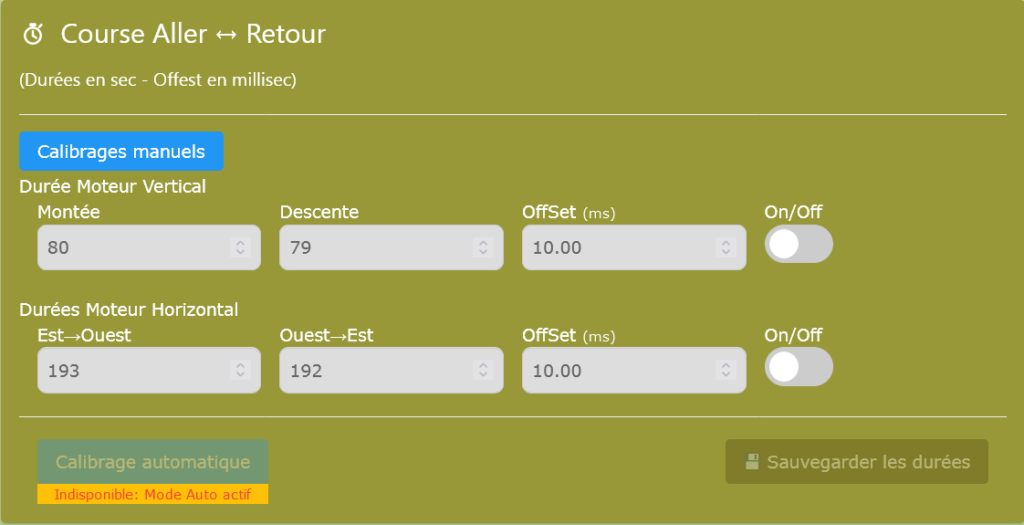
- Aller sur la page Moteurs.
- Dans la rubrique « Course Aller ↔ Retour » cliquer sur « Calibrage automatique ».
- Choisir si tu as des fins de course câblées :
- Oui : le moteur s’arrête automatiquement à la butée.
- Non : il faudra signaler la butée manuellement.
A) Calibrage automatique des durées Aller/Retour (butées)
Objectif
Mesurer automatiquement les temps réels des courses (aller + retour) pour chaque axe, afin de remplir les durées moteur utilisées ensuite par le système.
Procédure
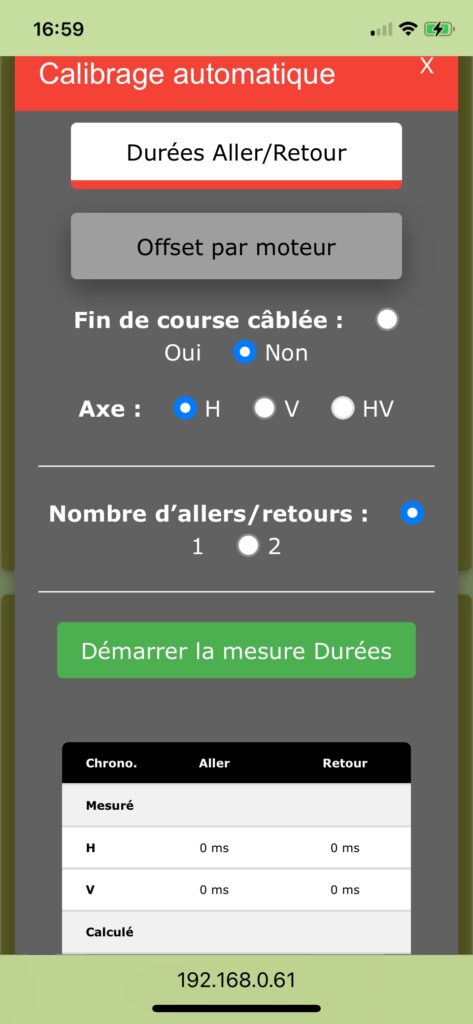
- Ouvrir Durées Aller/Retour.
- Sélectionner :
- Fin de course câblée : Oui / Non
- Axe : H / V / HV
- Nombre d’allers/retours : 1 ou 2
(2 donne une moyenne et réduit l’erreur)
- Cliquer Démarrer la mesure.
Pendant la mesure
- Si fin de course = Oui : ne rien toucher, attendre la fin.
- Si fin de course = Non :
- surveiller le mouvement,
- signaler la butée dès que le moteur touche la butée.
- Deux possibilités équivalentes pour signaler la butée :
- Cliquer 1 seul clic sur “Simuler la butée” dans l’interface.
- Ou faire un appui bref sur le bouton physique (POUSSOIR_WIFI).
Dans les deux cas, le moteur est immédiatement arrêté et le système comprend que la butée est atteinte.
Fin / Validation
- À la fin, les valeurs mesurées apparaissent (aller et retour).
- Choisir quoi enregistrer :
- H (horizontal),
- V (vertical),
- ou HV (les deux).
- Valider pour enregistrer en mémoire.
Annuler
- “Annuler” remet les valeurs provisoires à zéro sans écriture en mémoire.
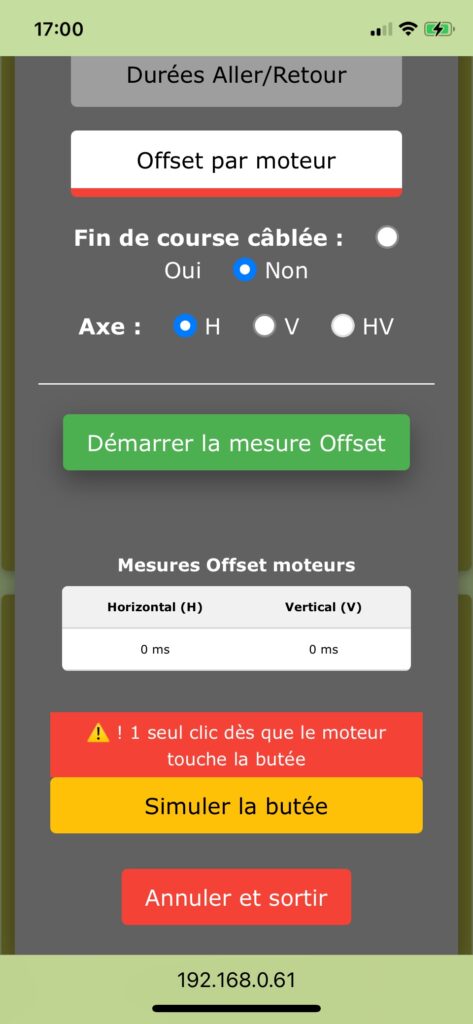
B) Calibrage Offset (correction retard au démarrage moteur)
Objectif
Compter l’erreur cumulée liée aux redémarrages moteur / inertie / latence, et calculer un offset unitaire (en ms) qui corrigera les prochains alignements.
INFO : la valeur par défaut est de 10ms par moteur et peut suffire pour des moteurs 12V continu avec réducteur.
IMPORTANT : le calibrage des durées doit avoir été effectué au préalable.
Procédure
- Ouvrir Offset par moteur.
- Choisir :
- Fin de course câblée : Oui / Non
- Axe : H / V / HV
- Cliquer Démarrer la mesure Offset.
Le système lance des segments moteur jusqu’à la butée. Ne rien faire jusqu’à la fin de la séquence.
Fin du calibrage Offset
- Si fin de course = Oui : arrêt automatique.
- Si fin de course = Non :
signaler la butée :
• soit via le bouton “Simuler la butée”.
• soit par un appui bref sur le bouton physique.
Sauvegarde de l’offset
- Appuyer sur l’action Offset :
cela enregistre :- Offset_Mot_A (H)
- Offset_Mot_B (V)
puis écrit en mémoire.
Stop
- Le bouton stop arrête tout et remet les offsets provisoires à 0.
C) Mesure des limites et de centrage.
Cette fonction sert à contrôler mécaniquement le centrage réel du Traqueur.
Elle ne modifie rien automatiquement et ne doit être réalisée que lorsque tous les réglages moteurs sont effectués et validés.
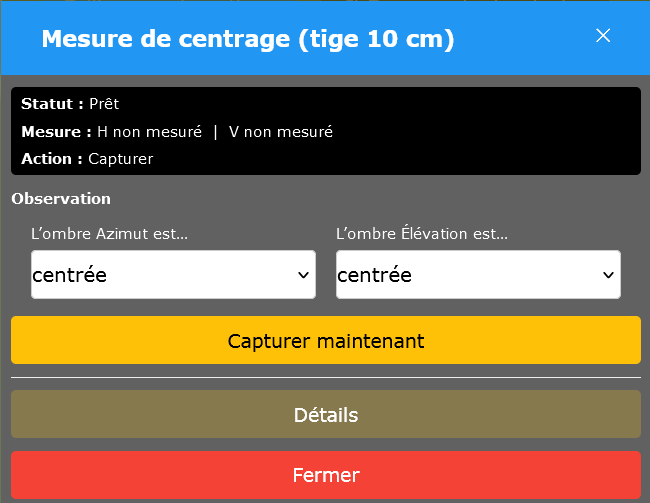
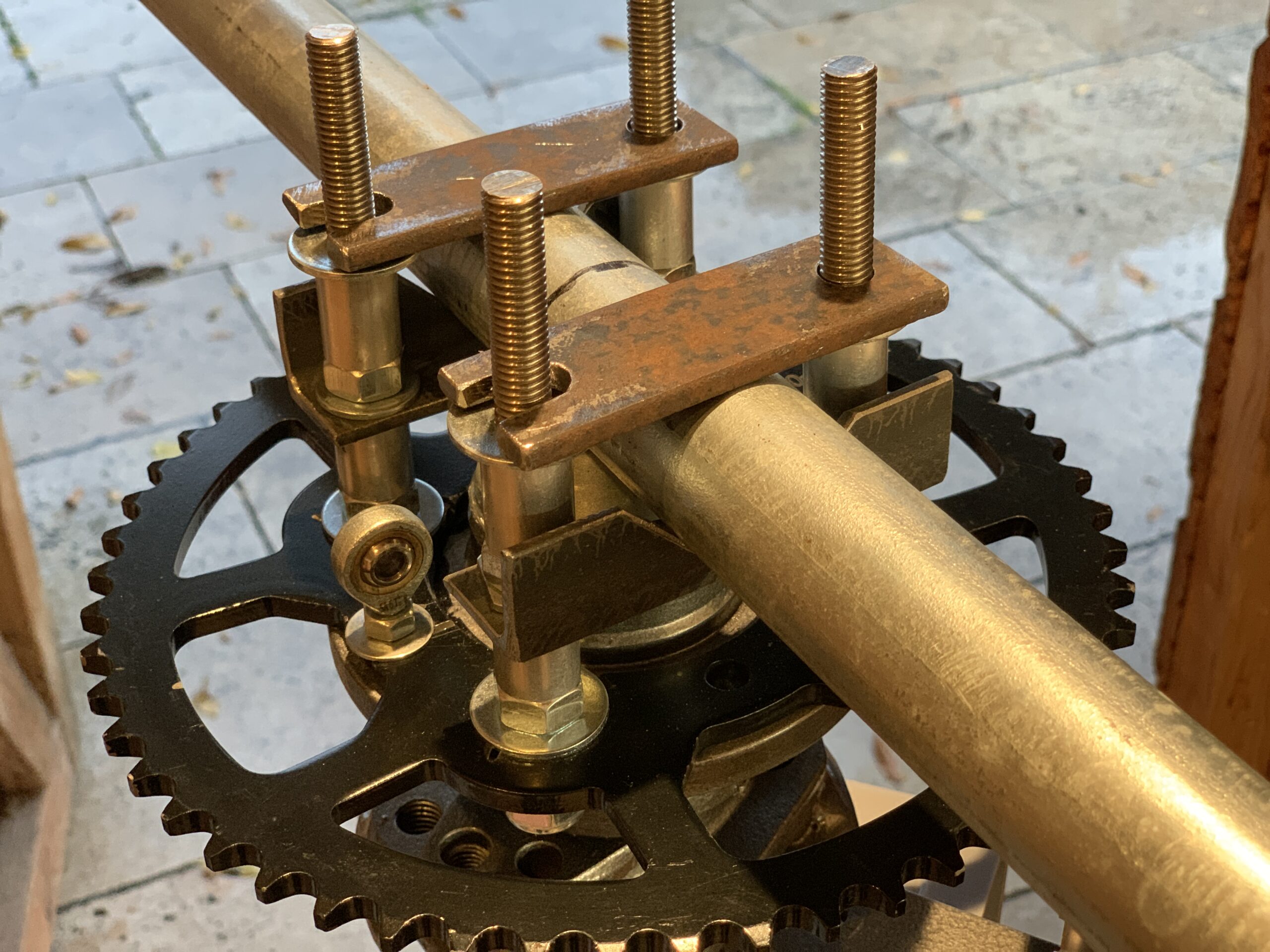
📌 La tige, c’est quoi ?
Une tige rigide d’environ 10 cm, fixée verticalement et perpendiculairement au panneau. Elle sert uniquement de référence visuelle (tel un cadran solaire).
Quand le panneau est parfaitement aligné avec le Soleil : 👉 l’ombre doit tomber exactement au pied de la tige.
🧭 Ce que fait l’utilisateur
- Il attend une situation d’alignement (plein Soleil).
- Il observe l’ombre de la tige.
- Si l’ombre n’est pas centrée :
- il mesure le décalage en centimètres,
- il l’indique dans le formulaire.
Le système convertit ce décalage en écart angulaire estimé.
🎯 À quoi sert le formulaire si c’est visuel ?
Il sert à :
- Quantifier précisément le décalage (cm → degrés)
- Vérifier si les plages Azimut ou Élévation sont mal réglées ou décalées (translation)
- Confirmer si le point milieu (Sud / centre mécanique) est toujours correct
- Au final, cela permet de détecter :
- un axe azimut qui a glissé,
- une butée électrique déplacée,
- un décentrage après choc ou rafale,
- un déplacement axial d’un élément mobile.
👉 On ne corrige pas automatiquement.
👉 On obtient un diagnostic chiffré.
👉 L’utilisateur décide s’il faut ajuster la mécanique.
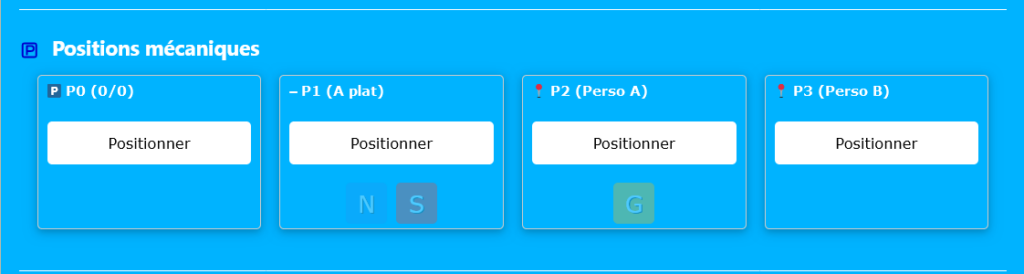
4) Configurer les positions et verrous – V10
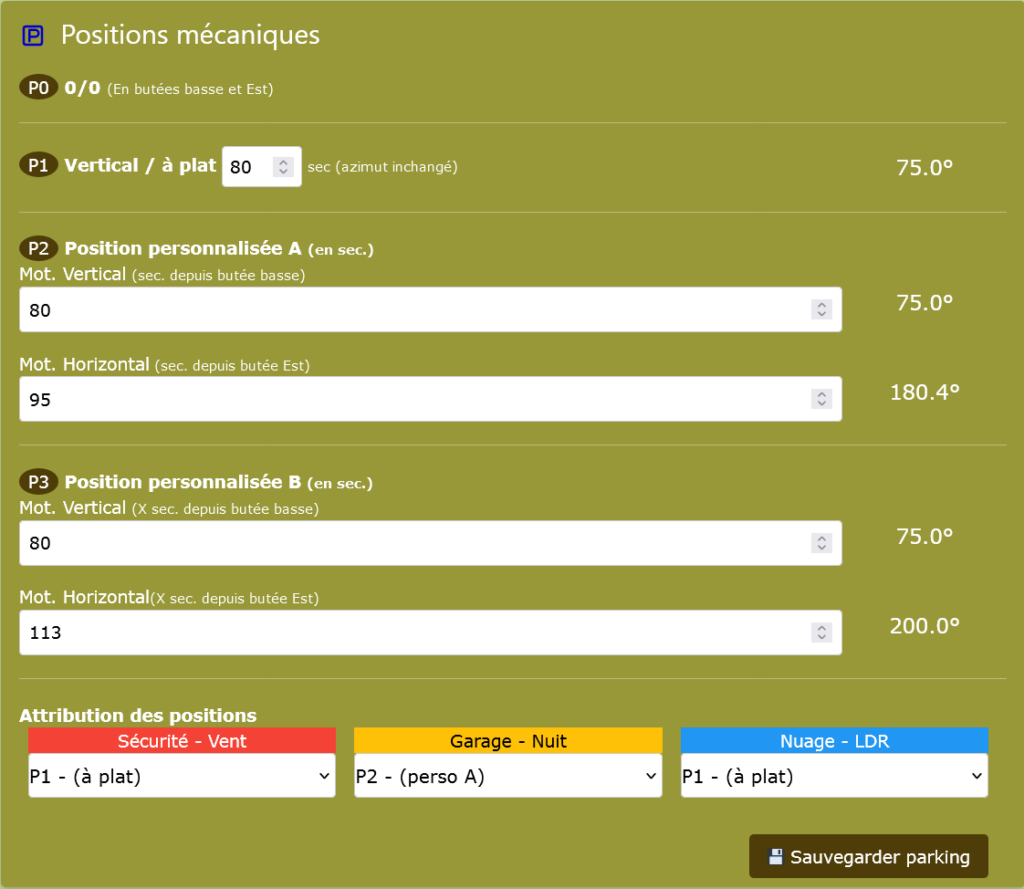
1️⃣ Régler une position (P1, P2 ou P3)
NB : P0 est une position non réglable, elle correspond aux butées Est et Basse (0/0).
Pour toutes les positions réglables, toujours partir de 0 seconde:
- Vertical : butée BASSE = 0 sec
- Horizontal : butée EST = 0 sec
Puis ajouter le nombre de secondes vers la butée opposée :
- vers le HAUT pour le vertical
- vers l’OUEST pour l’horizontal
- ➡️ Sauvegarder.
Si je souhaite que mon Traqueur se positionne à fond à l’Ouest sur la butée, je saisie la durée maximale du déplacement aller du vérin.
2️⃣ Choisir la position pour chaque verrou
Pour chaque verrou suivants :
- Sécurité – Vent
- Garage – Nuit
- Nuage – LDR (utilisée si alignement en mode capteur LDR)
Sélectionner la position souhaitée :
- P0 (0/0 fixe)
- P1 Vertical / à plat
- P2 Personnalisée A
- P3 Personnalisée B
- ➡️ Sauvegarder.
3️⃣ Exemples typiques
Exemple A : Je souhaite que mon Traqueur se positionne à plat en cas de Vent fort, sans modifier son Azimut et qu’au coucher du Soleil il vienne se positionner à plat en butée Est.
🔹 Sécurité vent à plat sans changer l’azimut
- Régler P1 (réglage vertical uniquement)
- Sélectionner P1 dans Sécurité
🔹 Garage à plat vers l’Est
- Régler P2 (ou P3 au choix):
- Vertical = temps vers butée haute (durée maximale pour être en butée haute)
- Horizontal = 0 sec (butée Est)
- Sélectionner P2 dans Garage
- ➡️ Sauvegarder.
Exemple B : Mon Traqueur est conçu avec deux axes combinés (type Ecoworthy), je souhaite qu’il se positionne à plat en cas de Vent fort, et qu’au coucher du Soleil il vienne aussi se positionner à plat. Je souhaite également qu’en cas de temps très nuageux, mon Traqueur vienne se positionner face au ciel (Nuage) pour améliorer son rendement tout en évitant qu’il s’aligne de nuage en nuage selon leur luminosité.
🔹 Sécurité vent à plat (2 axes combinés)
- Régler P2 (ou P3 au choix)
- Vertical = durée maximale pour être en butée haute.
- Horizontal = la moitié de la durée maximum à l’aller.
- Sélectionner P2 dans Sécurité
🔹 Garage à plat (2 axes combinés)
Je peux réutiliser la position P2 déjà réglée, mais je peux également régler et utiliser P3.
- Régler P2 (ou P3 au choix):
- Vertical = durée maximum du vérin.
- Horizontal = la moitié de la durée maximum.
- Sélectionner P2 dans Garage.
- ➡️ Sauvegarder.
🔹 Nuage à plat / face au ciel (2 axes combinés)
C’est la même procédure que pour Garage à plat ou Sécurité.
- Régler P2 (ou P3 au choix):
- Vertical = durée maximum du vérin.
- Horizontal = la moitié de la durée maximum.
- Sélectionner P2 dans Nuage.
- ➡️ Sauvegarder.
À retenir
- On règle une position.
- On l’affecte à un verrou.
- ➡️ On sauvegarde.
5) Configurer le type de Traqueur – V10
Page Moteurs:
Sélectionne ton modèle de Traqueur (1 ou 2 Axes).
➡️ Sauvegarde.
Le formulaire adapté apparait automatiquement.
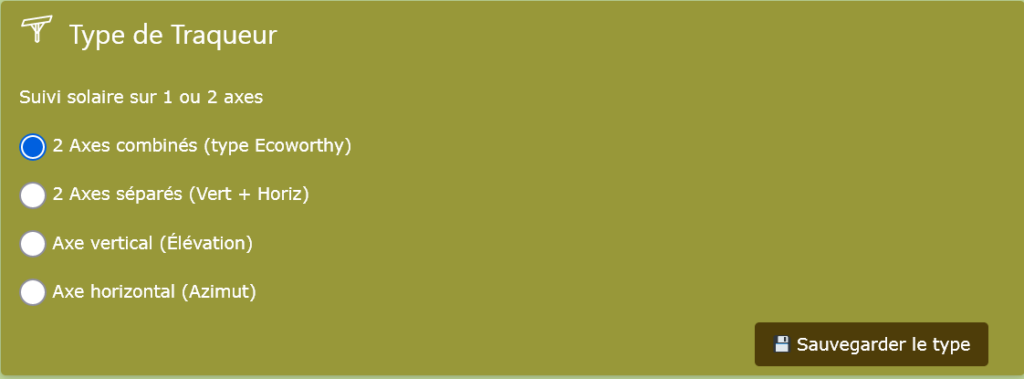
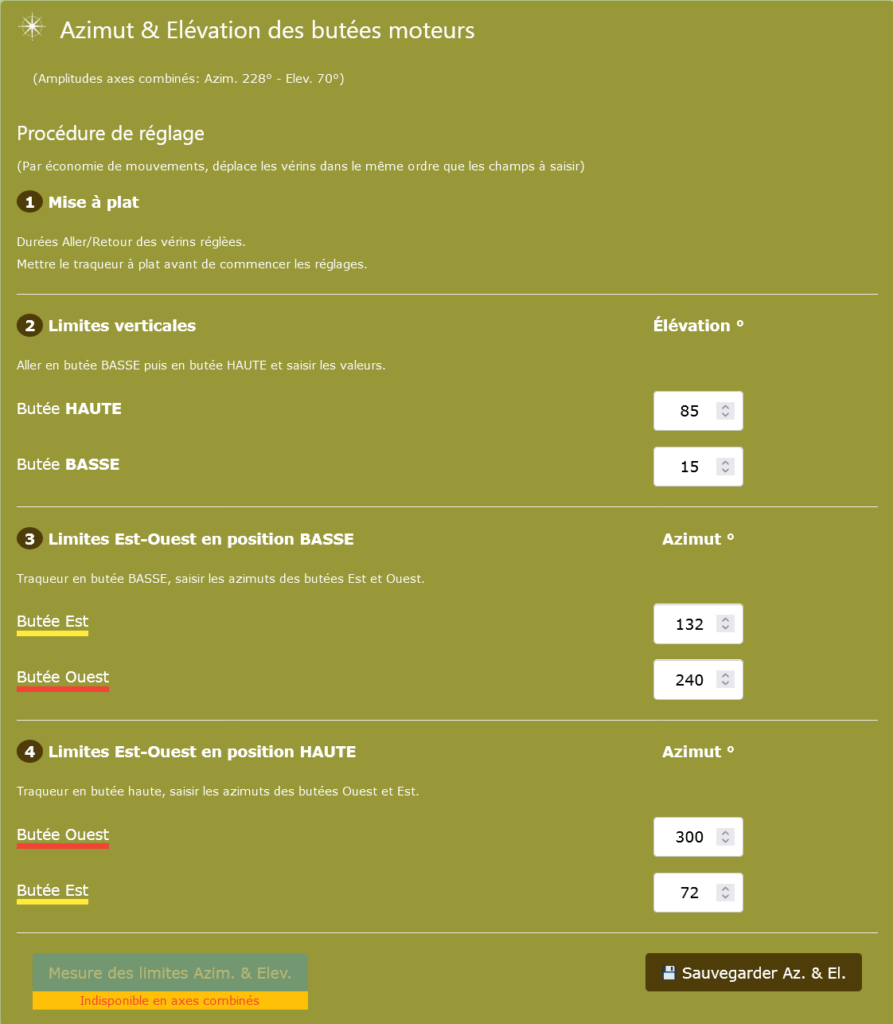
Particularité des réglages Azimut et Elevation pour les Traqueurs avec des axes combinés (type Ecoworthy).
Pour te faciliter les réglages et éviter des mouvements répétés de butée à butée, progresse dans l’ordre chronologique descendant des champs à saisir.
Utilise les infos bulles pour t’aider si besoin.
6) Coordonnées et mode de suivi solaire – V10
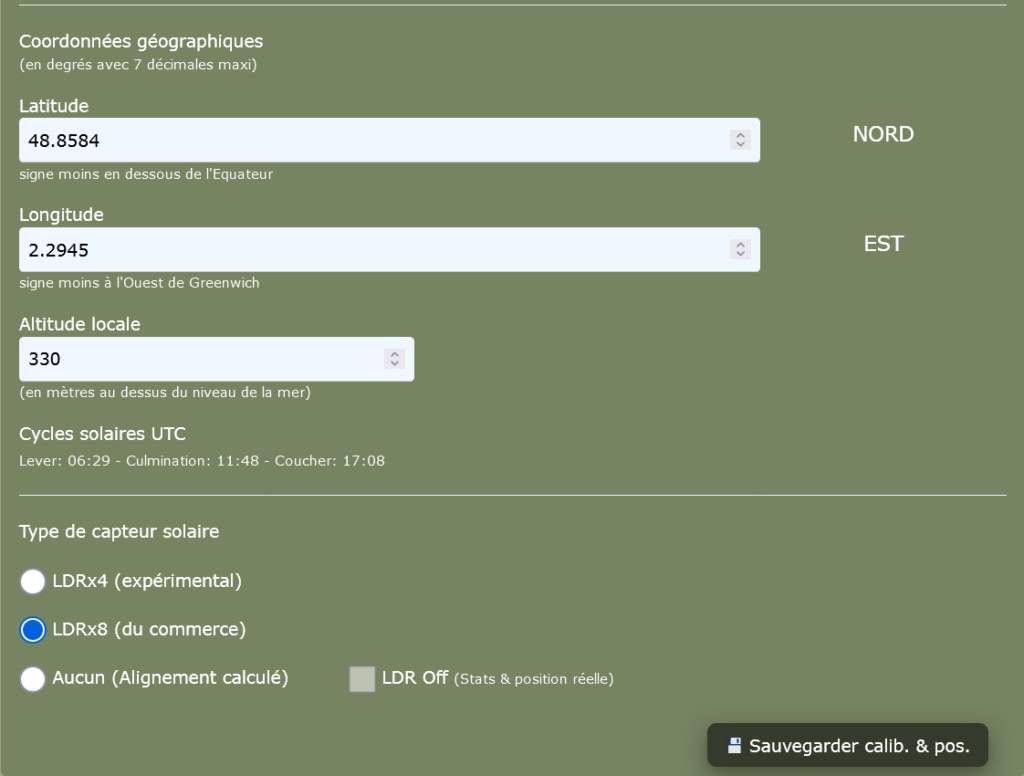
Page Capteurs :
- Laisse les réglages des capteurs pour le moment.
- Saisie les coordonnées géographiques et l’altitude de la position du Traqueur.
- Coche le mode de suivi solaire. Si un capteur est connecté, il peut être utilisé soit pour l’alignement, soit pour comparer la position calculée et la position réelle par grand Soleil.
- Sélectionne ton modèle de Traqueur (1 ou 2 Axes)
- ➡️ Sauvegarde.
Altitude locale (m) : corrige l’horizon pour le lever/coucher. Plus l’altitude est grande, plus le lever est légèrement avancé et le coucher légèrement retardé (car le seuil en degrés du lever/coucher est abaissé).
7) Configurer le réseau WiFi – V10
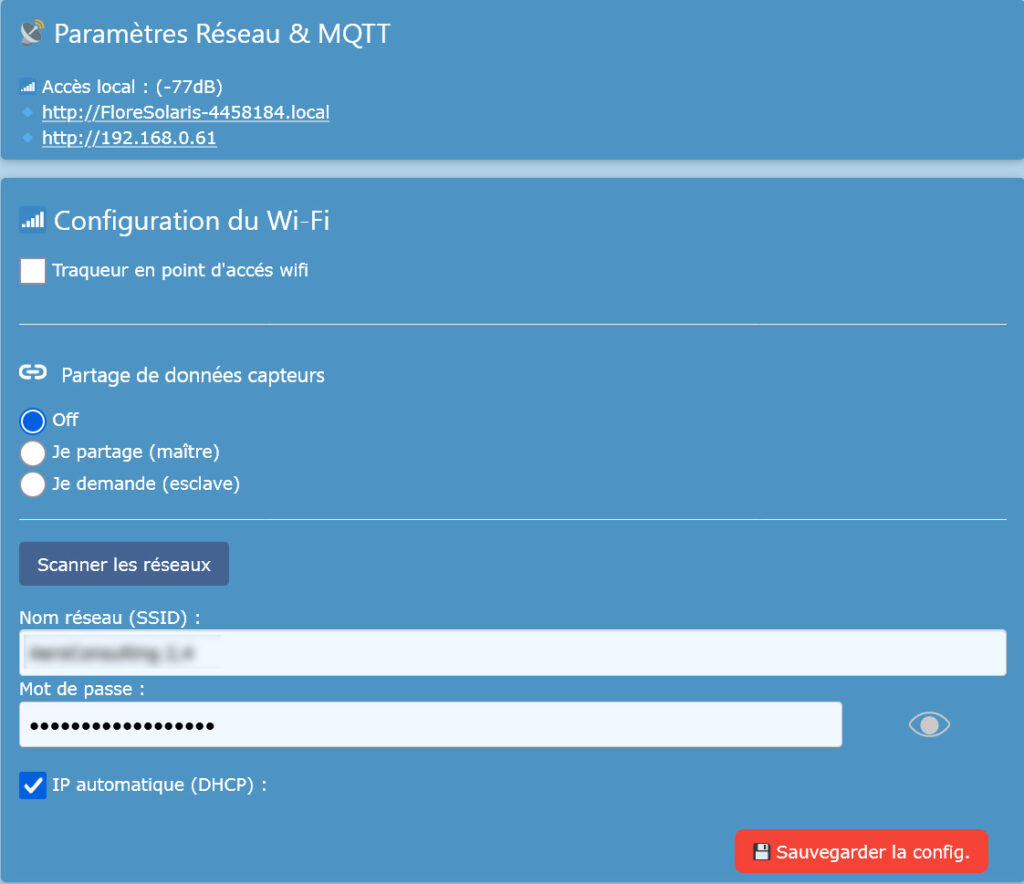
Configuration Wi-Fi (connexion à ta box)
- Se rendre sur la page Réseau : Décoche “Traqueur en mode Point d’accès WiFi” (sinon le Traqueur reste sur son Wi-Fi interne).
- Renseigne le SSID (nom du WiFi) et le mot de passe de ta box.
- Tu peux laisser DHCP activé si ta Box attribue un IP fixe à chaque nouvel appareil. Sinon, décoche DHCP et saisie l’IP pour ton Traqueur et celui de la BOB (Gateway).
- Laisse Partage Maître/Esclave sur OFF pour l’instant.
Après sauvegarde, le Traqueur rejoint ta box : son IP attribuée s’affiche avec un lien pour y accéder.
Si besoin, la partie Maître/Esclave se configure après que la connexion réseau soit établie. Le Traqueur Maître doit être configuré « Je partage » pour accepter les demandes Esclaves.
8) Accès Sécurisé au Traqueur – V10
Tu peux sécuriser l’accès à l’interface de ton Traqueur avec un mot de passe crypté et mémorisé dans ton navigateur web. Si tu utilises un autre navigateur ou un autre appareil, il te sera redemandé.

En cas d’oubli, il est possible de supprimer le mot de passe et de désactiver la protection :
il suffit d’accéder physiquement au Traqueur et de maintenir le bouton poussoir appuyé pendant 10 à 12 secondes (si celui-ci est installé).

9) Fonctionnement du bouton poussoir (si installé) – V10
🔘 ⚠ Important :
Ce bouton ne doit pas être utilisé comme un arrêt d’urgence général pour couper l’alimentation du système.
Il permet d’accéder manuellement à différentes fonctions essentielles selon la durée d’appui :
⏱ Appui court (0 à 2 secondes)
➡ Passage en mode manuel
Le traqueur quitte le mode automatique et stoppe toute action en court.
⏳ 3 à 4 secondes
(Aucune action – zone neutre)
📡 5 à 7 secondes
➡ Activation / Désactivation du WiFi
Mise en route ou arrêt du Wifi mode Point d’Accès (AP) du traqueur.
⏳ 8 à 9 secondes
(Aucune action – zone neutre)
🔐 10 à 12 secondes
➡ Effacement des mots de passe.
- Désactivation de l’accès sécurisé et efface le mot de passe.
- Efface le mots de passe du WiFi Access Point du Traqueur (celui de l’accès à la Box est conservé)
⏳ 13 à 14 secondes
(Aucune action – zone neutre)
🏭 15 secondes et plus
➡ Réinitialisation complète (Reset usine)
Retour aux paramètres d’origine.
Les autres réglages sont relativement intuitifs certains possèdent des infos bulles explicatives. L’activation/désactivation des info bulles se fait depuis la page « Home » en dessous de la courbe du Soleil.
Soutenir
Les projets de marcosoleil.fr sont partagés librement, dans un esprit orienté vers l’autonomie technique mais aussi vers une évolution personnelle.
Cette démarche s’inscrit dans la continuité de celle de l’association Le Bon Sens de la Vie (loi 1901).
Les contributions sont versées à l’association. Si ça te parle, tu peux contribuer.