Cette page aide à comprendre pourquoi le traqueur n’aligne pas comme tu l’imagines, alors que le logiciel reste cohérent.
Ici, on ne touche pas encore aux chronos moteur, aux positions P1/P2/P3, ni au parking.
Les réglages réellement concernés sont :
→ page Capteurs
• type de capteur solaire
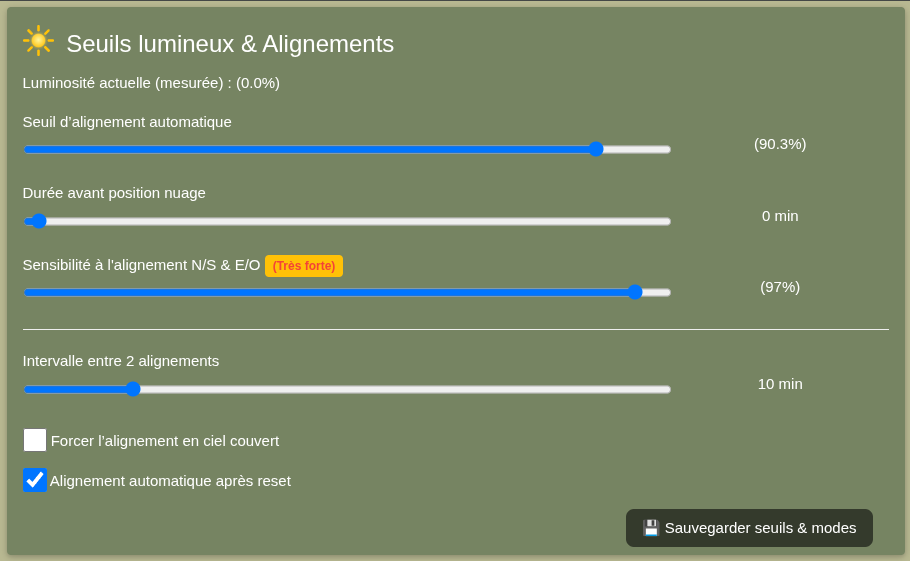
• seuil d’alignement automatique
• durée avant position nuage
• sensibilité N/S & E/O
• intervalle entre 2 alignements
• forcer l’alignement en ciel couvert
• alignement automatique après reset

Sommaire
- Calibrage des LDR avec l’option trimmers.
- Il ne s’aligne pas alors qu’il y a de la luminosité
- Il fait le yo-yo
- Il passe trop vite en position nuage
- Il ne va jamais en position nuage
- Il suit alors qu’il n’y a pas de soleil visible
- Il ne réagit pas comme mon ancien système LDR
- Il ne reprend pas l’alignement après redémarrage
Si tu as installé les trimmers pour calibrer chaque LDR, voici une méthode simple pour réaliser les réglages des LDR avec trimmers
Cette procédure concerne uniquement le montage LDR réglable :
| Élément | Valeur |
|---|---|
| R13 à R16 | 240 Ω |
| R33 à R36 | trimmers 2,2 kΩ, ou 2 kΩ si 2,2 kΩ introuvable |
Principe
Le réglage des trimmers sert à rapprocher les valeurs des LDR lorsque le panneau est réellement aligné avec le Soleil.
Il ne faut pas chercher à obtenir des valeurs identiques sur toute la plage de luminosité. Les LDR ne sont pas parfaitement linéaires. Le réglage doit être fait uniquement dans la plage utile au suivi solaire, c’est-à-dire au-dessus du seuil d’alignement défini dans la page Capteurs.
Procédure
| Étape | Action |
|---|---|
| 1 | Ouvrir la page Diagnostic. |
| 2 | Passer le traqueur en mode manuel. |
| 3 | Utiliser les commandes manuelles de la page Diagnostic pour orienter le panneau face au Soleil. |
| 4 | Poser une tige verticale d’environ 10 cm sur le panneau. Un morceau de polystyrène avec un grand clou planté bien verticalement peut convenir. |
| 5 | Déplacer le traqueur jusqu’à ce que l’ombre de la tige soit centrée. Le panneau est alors correctement aligné avec le Soleil. |
| 6 | Lire les valeurs des 4 LDR dans la page Diagnostic. |
| 7 | Régler les trimmers Est / Ouest pour rapprocher la valeur la plus faible de la valeur la plus forte. |
| 8 | Faire de même pour les LDR Nord / Sud. |
| 9 | Ne pas réduire volontairement une valeur haute pour rejoindre une valeur plus basse. Chercher plutôt à remonter la valeur faible quand le montage le permet. |
| 10 | Vérifier ensuite que le traqueur corrige bien dans le bon sens en mode LDR. |
Exemple
Si la LDR Ouest affiche une valeur plus forte que la LDR Est, ne pas chercher à baisser la valeur Ouest.
Le bon réglage consiste à ajuster le trimmer de façon à rapprocher la valeur Est de la valeur Ouest, dans la plage de luminosité utile au suivi.
Soleil au zénith
Il n’est pas obligatoire d’avoir exactement la même valeur sur les 4 LDR lorsque le Soleil est au zénith.
En théorie, si le capteur LDR est parfaitement symétrique, parfaitement orienté, sans ombre parasite et avec 4 LDR identiques, les valeurs devraient être proches.
En pratique, il peut y avoir des écarts à cause :
- des tolérances des LDR ;
- de la géométrie du support ;
- de l’ombre du séparateur ;
- de l’orientation réelle du capteur ;
- de la luminosité ambiante ;
- du câblage et des résistances.
Le réglage important est donc surtout par axe :
| Axe | Objectif |
|---|---|
| Est / Ouest | valeurs les plus proches possible quand le panneau est aligné |
| Nord / Sud | valeurs les plus proches possible quand le panneau est aligné |
Le but n’est pas une égalité parfaite, mais un équilibre suffisant pour que le logiciel sache dans quel sens corriger.
Les symptômes courants.
Il ne s’aligne pas alors qu’il y a de la luminosité
Ce symptôme pointe d’abord vers :
• le seuil d’alignement automatique
• le type de suivi réellement utilisé
Ne touche pas encore à :
• chronos
• positions
• butées
• parking
Fais d’abord :
1. baisse un peu le seuil d’alignement automatique ;
2. si tu veux qu’il continue malgré un ciel couvert, active « Forcer l’alignement en ciel couvert ».
Si ça ne change rien :
regarde si tu es en alignement avec LDR ou en alignement calculé.
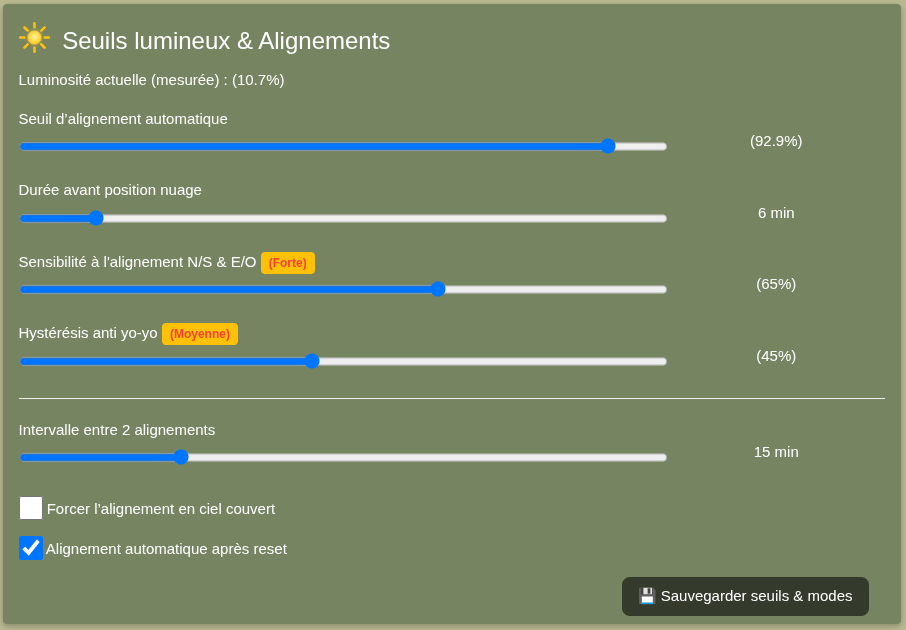
Il fait le yo-yo
Ce symptôme pointe d’abord vers :
- une sensibilité d’alignement trop forte,
- un intervalle entre 2 alignements trop court.
Ne touche pas encore à :
- moteurs,
- offset,
- positions.
Fais d’abord :
- réduis la sensibilité N/S et E/O ;
- si besoin, augmente aussi l’intervalle entre 2 alignements.
Si le yo-yo continue :
- vérifie qu’un côté du capteur n’est pas masqué ou plus exposé que l’autre,
- vérifie l’état du globe du capteur solaire (absence de buée) et qu’il est bien orienté et fixé,
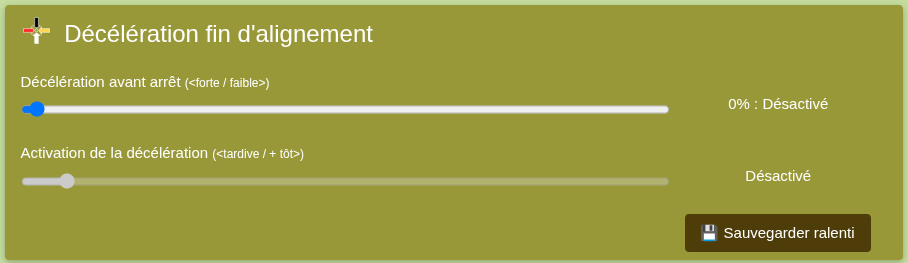
- si la vitesse des moteurs est trop rapide, l’alignement avec des LDR aura tendance à faire plus facilement le yo-yo même si la sensibilité est moyenne. Dans ce cas, soit tu utilises le réglage pour ralentir les moteurs en fin d’alignement, soit tu diminue la vitesse des moteurs en abaissant légèrement leur tension d’alimentation si c’est possible.
Il passe trop vite en position nuage
Ce symptôme pointe d’abord vers :
• la durée avant position nuage trop courte
• le seuil d’alignement trop haut
Ne touche pas encore à :
• P1 / P2 / P3
• parking
• sécurité
Fais d’abord :
1. augmente la durée avant position nuage ;
2. si besoin, baisse un peu le seuil d’alignement ;
3. si tu ne veux plus de position nuage, active la case « Forcer l’alignement en ciel couvert ».
Si ça ne change rien :
le problème vient peut-être du mode de suivi choisi au départ.
Il ne va jamais en position nuage
Ce symptôme pointe d’abord vers :
• une durée avant position nuage à 0 (0 = désactivé)
• « Forcer l’alignement en ciel couvert » activé
• le mode sans capteur
Fais d’abord :
1. vérifie si la durée avant position nuage vaut 0 ;
2. vérifie si « Forcer l’alignement en ciel couvert » est activé ;
3. vérifie si tu es en alignement calculé.
Si ça ne change rien :
il faut relire la logique du mode de suivi choisi avant de toucher aux autres réglages.
Il suit alors qu’il n’y a pas de soleil visible
Ce symptôme pointe d’abord vers :
• « Forcer l’alignement en ciel couvert »
• l’alignement calculé
Fais d’abord :
1. regarde si « Forcer l’alignement en ciel couvert » est activé ;
2. regarde si le traqueur est en alignement calculé.
Si c’est le cas :
ce comportement peut être normal.
Il ne réagit pas comme mon ancien système LDR
Ce symptôme pointe d’abord vers :
• le type de capteur solaire choisi
• l’utilisation réelle ou non des LDR pour l’alignement
Fais d’abord :
1. regarde si tu es en LDRx4 / LDRx8 ou en « Aucun (alignement calculé) » ;
2. regarde si les LDR servent vraiment à l’alignement, ou seulement aux stats / calibrage.
À retenir :
un ancien système purement LDR est analogique, il ne réagit pas de la même façon sur l’ESP32 qui convertit en numérique, moins precis à la lecture. Par ailleurs, le suivi calculé (astronomique) ne cherche pas un alignement parfait avec le centre du Soleil, mais il anticipe de plusieurs degrés dans le sens de la course du Soleil.
exemple: la position du Soleil est 192.75° et 58,78° et juste après un alignement, le Traqueur est à 194,80° et 56,75° => c’est normal, car le logiciel à anticipé le déplacement du Soleil pour « le voir passer » et bénéficier ainsi d’une plus grande luminosité pendant plus longtemps.
Il ne reprend pas l’alignement après redémarrage
Ce symptôme pointe d’abord vers :
• « Alignement automatique après reset »
Fais d’abord :
active cette option si tu veux une reprise automatique après reboot.
Quelle est la suite ?
Si le problème vient finalement du 0/0, des chronos ou des durées
Passer à : Régler moteurs, positions, butées, limites et parking
Si le problème vient d’une butée ou d’une fin de course
Passer à : Comprendre / régler les fins de course
Si le problème vient du capteur, du signal ou du câblage
Passer à : Câblage et modules électroniques
Dans cette page, on cherche d’abord à comprendre le mode de suivi utilisé et quel réglage Capteurs agit réellement.
➡️ Retour au forum Traqueur & autres DIY (ESP32)
Soutenir
Les projets de marcosoleil.fr sont partagés librement, dans un esprit orienté vers l’autonomie technique mais aussi vers une évolution personnelle.
Cette démarche s’inscrit dans la continuité de celle de l’association Le Bon Sens de la Vie (loi 1901).
Les contributions sont versées à l’association. Si ça te parle, tu peux contribuer.