Cette page sert à éviter les faux diagnostics.
Tant que la chaîne fin de course n’est pas validée, on ne règle pas les chronos, les positions, le parking ni les limites.
Les réglages réellement concernés sont :
- la position réelle de la fin de course,
- le contact ou capteur lui-même,
- le câblage,
- le type choisi dans le logiciel,
- le calibrage, en dernier seulement.
Sommaire
- 1. Point de départ
- 2. Le moteur s’arrête avant la butée mécanique physique
- 3. Le moteur touche la butée mécanique physique
- 4. Type de fin de course choisi dans le logiciel
- 5. Si la chaîne fin de course est correcte
- 6. Si tu n’as pas de fin de course câblée
- 7. Ce qu’on ne touche pas tant que ce n’est pas validé
- 8. Symptômes bizarres mais fréquents
- 9 Causes probables pouvant perturber les FDC électroniques
- 10. Quelle est la suite ?
1. Point de départ
🟢 Le moteur s’arrête avant la butée mécanique physique
La chaîne FDC agit.
🔴 Le moteur touche la butée mécanique physique
La chaîne FDC n’a pas arrêté le mouvement au bon moment.
2. Le moteur s’arrête avant la butée mécanique physique
Conclusion : la FDC agit bien en faisant pour le moment abstraction de la corrélation avec la durée de la course.
Si le Fin de course s’active très en avant de la butée prévue ou en plein milieu de la course, alors le capteur de fin de course ou son câblage est en cause. voir 8. Symptômes bizarres mais fréquents
La suite logique :
- vérifier si l’arrêt se fait au bon endroit,
- si l’arrêt est trop tôt ou trop tard : corriger la position réelle de la FDC,
- si l’arrêt est au bon endroit : continuer ensuite vers le réglage de la référence 0/0.
✅ Ici, on ne repart pas sur le type NO / NC ni sur le câblage.
3. Le moteur touche la butée mécanique physique
Là, on élimine dans cet ordre :
1️⃣ Position réelle de la FDC
Est-elle placée au bon endroit ?
2️⃣ Contact / capteur
Change-t-il bien d’état quand la butée est atteinte ?
3️⃣ Câblage
Le signal arrive-t-il correctement jusqu’au système ?
4️⃣ Type choisi dans le logiciel
Le type sélectionné correspond-il au vrai montage ?
5️⃣ Calibrage
Seulement après les 4 points au-dessus.
4. Type de fin de course choisi dans le logiciel
Le type choisi change l’interprétation de la butée.
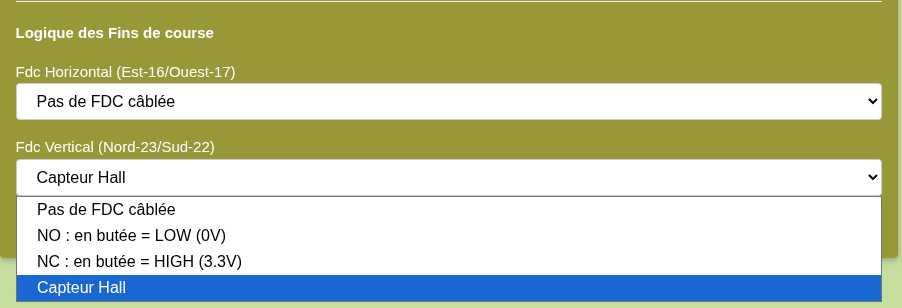
4. Type de fin de course choisi dans le logiciel
Pas de FDC câblée
Le logiciel ignore cette entrée.
La fin de course est alors validée uniquement par le chrono.
FDC NO
Butée non atteinte = +3.3V
Butée atteinte = masse
Donc en butée = état bas
FDC NC
Butée non atteinte = masse
Butée atteinte = +3.3V
Donc en butée = état haut
Hall
Cas particulier si ton montage utilise des capteurs Hall à la place d’un simple contact. Pas de reglage particulier, un simple aller retour en butée calibre les butées.
🔧 Même capteur, même fil, mauvais type choisi = mauvais diagnostic.
5. Si la chaîne fin de course est correcte
On continue dans cet ordre :
1️⃣ Référence mécanique 0/0
Valider la vraie position de départ.
2️⃣ Initialisation des chronos
0 seconde doit correspondre à cette position réelle.
3️⃣ Durées de course
Les temps doivent correspondre aux courses réelles.
4️⃣ Calibrage
Le calibrage affine ensuite.
5️⃣ Limites, positions, parking
Seulement après.
➡️ FDC OK → position FDC OK → 0/0 → chronos → durées → calibrage → limites → positions
📍 Sur ce logiciel, la référence 0/0 correspond à la butée EST + butée BASSE.
6. Si tu n’as pas de fin de course câblée
Le logiciel peut fonctionner sans FDC câblée.
- choisir pas de FDC câblée,
- surveiller le mouvement,
- signaler la butée quand elle est atteinte.
Suivant la page ou la fonction utilisée, cela passe par la simulation de butée.
7. Ce qu’on ne touche pas tant que ce n’est pas validé
- les chronos,
- les positions mémorisées,
- le parking,
- les limites.
⛔ Corriger le reste avant la chaîne FDC fait perdre du temps.
8. Symptômes bizarres mais fréquents
Parfois un alignement ou une mise en position (P0, P1, P2 ou P3) fonctionne bien, parfois le mouvement s’arrête à mi-course ou n’avance pas complètement.
Le logiciel travaille avec des durées. Il alimente donc les moteurs tant que la durée prévue n’est pas écoulée, ou jusqu’à ce qu’une information lui demande de s’arrêter. Cette information peut venir d’un capteur de proximité, d’un contact sec, ou d’un autre système de fin de course.
Dans le code actuel, les fins de course sont déjà filtrées par un anti-rebond d’environ 100 ms. Malgré cela, si le traqueur s’arrête de façon aléatoire, cela fait penser à une information de fin de course instable, furtive ou non franche pendant la course du vérin.
Le logiciel peut alors interpréter brièvement que la butée est atteinte et stopper la séquence trop tôt. L’observateur ne verra pas forcément la fin de course active, justement parce que le signal n’est pas établi franchement.
Le moteur ne se met plus complètement à plat alors que rien n’a été modifié
Chercher d’abord du côté de la FDC concernée, de son réglage mécanique, du capteur, du fil, du connecteur ou du type choisi dans le logiciel.
Test efficace
Modifie la logique de fin de course et sélectionne Pas de fin de course câblée pour l’axe qui pose problème.

Lance ensuite une mise en position manuellement et vérifie que la séquence se déroule correctement. Reviens ensuite sur la logique de fin de course qui utilise ton capteur, refais le test, puis recommence en bougeant légèrement les fils.
Vérifie aussi que ton capteur ne devient pas instable lorsqu’une masse métallique importante se trouve à proximité. Cela peut correspondre à certaines positions du traqueur, par exemple en fin de journée, quand des éléments de la structure passent plus près des capteurs.
Le problème apparaît de façon aléatoire
Un faux contact, un capteur mal réglé, un fil fatigué ou un signal non franc peut provoquer un arrêt prématuré sans panne franche visible.
Dans tous les cas, fais d’abord :
- mettre le traqueur en manuel,
- reproduire le mouvement concerné,
- surveiller l’état des FDC pendant le mouvement,
- bouger légèrement les fils, capteurs et connecteurs,
- approcher une masse métallique conséquente des capteurs,
- vérifier que le type choisi dans le logiciel correspond bien au vrai montage.
Déclenchement intempestif d’une fin de course
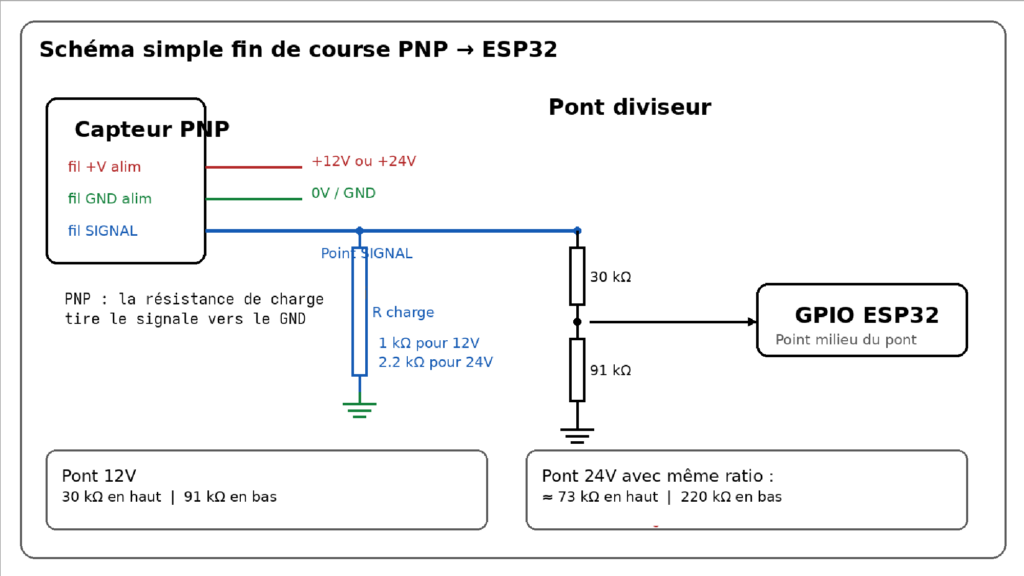
Si une fin de course semble s’activer sans raison apparente, le problème ne vient pas forcément du réglage logiciel. Sur certains capteurs électroniques 3 fils, la sortie peut devenir instable ou mal tenir son état au repos, ce qui provoque un faux déclenchement.
Dans ce cas, il est parfois possible de stabiliser le signal avec une résistance de tirage adaptée au type de sortie, placée avant le pont diviseur :
- tirage vers le + pour une sortie NPN ouverte,
- tirage vers la masse pour une sortie PNP ouverte.
Cette solution ne doit pas être appliquée au hasard, mais elle constitue une piste utile en cas de butée détectée de façon intermittente.
Valeur de la résistance de tirage
À 12 V :
- 1 kΩ ≈ 12 mA
- 4,7 kΩ ≈ 2,5 mA
- 10 kΩ ≈ 1,2 mA
1 kΩ = tirage ferme, mais capteur compatible obligatoire.
4,7 kΩ = bon compromis pour essai.
10 kΩ = plus léger, mais moins efficace contre flottement et parasites.
Règle simple : commencer par 4,7 kΩ, puis descendre à 1 kΩ si le signal reste instable et que le capteur le supporte.
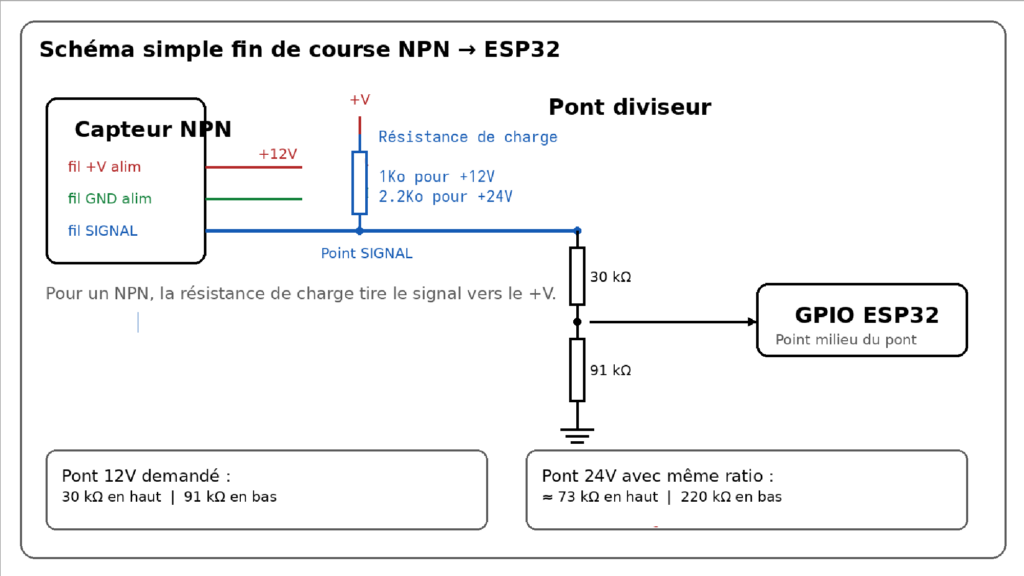
À 24 V:
Le choix de la résistance de tirage demande plus d’attention qu’en 12 V, car le courant augmente fortement. Une valeur de 1 kΩ impose déjà environ 24 mA, ce qui constitue un tirage très fort. En cas de doute, il est généralement plus prudent de commencer par 10 kΩ ou 4,7 kΩ, puis d’ajuster seulement si le signal reste instable.
📍 Une FDC instable peut simuler une butée atteinte.
CONCLUSIONS : Causes probables pouvant perturber les FDC électroniques..
- Câbles FDC longs non blindés : ils font antenne.
- Fils FDC proches des fils moteurs : pics au démarrage/arrêt moteur. –> d’autant plus important que la puissance demandée est importante
- Relais, contacteurs, drivers moteurs : arcs, fronts raides, EMI. –> idem que ci-dessus
- Alimentation bruitée : masse qui bouge, chute batterie, convertisseur DC/DC.
- Mauvaise masse commune : référence ESP32 instable. –> difference de masse entre ESP et les FDC et si les moteurs sont alimentés via une autre source, etc.
- Pull-up trop faible ou trop haute impédance : entrée GPIO facile à perturber. —> sur le PCB il y a la possibilité de stabiliser les entrées FDC avec des résistances de charge de 1Ko.
- Humidité / connecteur oxydé : fuite électrique intermittente.
- Capteur NPN ou son câble trop proche d’un câble de puissance. –> est ce que les fils de phases qui vont dans le JSY ne sont pas trop proche des fils des FDC ?
- Retour moteur ou vérin avec balais : gros générateur de parasites.
Idéalement, passer sur des FDC PNP Nc moins sensibles.
10. Quelle est la suite ?
Si la chaîne fin de course n’est pas bonne
On reste sur cette page jusqu’à trouver la cause.
Si la chaîne fin de course est bonne
Passer à : Régler moteurs, positions, butées, limites et parking
Si les butées sont bonnes mais que le traqueur ne suit pas correctement le soleil
Passer à : Comprendre l’alignement : LDR, calculé, nuage, sans capteur
Si la butée est bonne en théorie mais que le signal reçu n’est pas cohérent
Passer à : Câblage et modules électroniques
➡️ Retour au forum Traqueur & autres DIY (ESP32)
Soutenir
Les projets de marcosoleil.fr sont partagés librement, dans un esprit orienté vers l’autonomie technique mais aussi vers une évolution personnelle.
Cette démarche s’inscrit dans la continuité de celle de l’association Le Bon Sens de la Vie (loi 1901).
Les contributions sont versées à l’association. Si ça te parle, tu peux contribuer.