Cette page sert à régler la logique moteur dans le bon ordre.
Si tu changes les positions ou le parking avant d’avoir validé la position 0/0, les chronos et les durées, tu mélanges tout.
Les réglages réellement concernés sont :
- la référence mécanique 0/0,
- l’initialisation des chronos,
- les durées de course,
- le calibrage,
- les positions P1 / P2 / P3,
- les verrous Sécurité / Garage / Nuage,
- les limites de débattement.
Sommaire
- 1. Point de départ
- 2. Mettre le traqueur à sa référence 0/0
- 3. Initialiser les chronos
- 4. Calibrer les durées de course des vérins
- 5. Régler les positions
- 6. Choisir les positions de Sécurité, Garage et Nuage
- 7. Régler les limites
- 8. Quelle est la suite ?
1. Point de départ
🔧 Au début, on travaille en manuel dans la page Home
Après un reboot (coupure de courant ou hard reset sur le bouton de l’ESP32), ton Traqueur doit être initialisé. Si le mode Automatique est activé au démarrage, le Traqueur va s’initialiser tout seul. Sinon tu dois le faire manuellement.
Donc la première chose à faire est d’initialiser le système avant d’utiliser les commandes moteur.
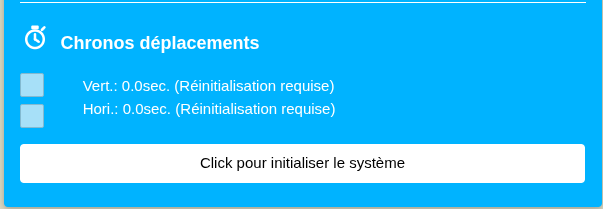
Ensuite tu peux utiliser les commandes et faire des remise à zéro des chronos si besoin.
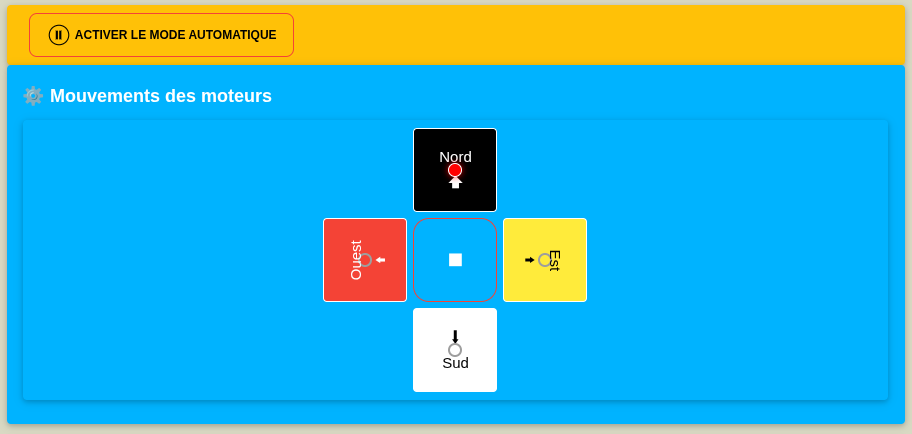
Tu peux maintenant utiliser les commandes de déplacements des vérins.
- Nord / Sud
- Est / Ouest
Utilise les boutons de commande SUD et EST pour positionner le Traqueur. Une fois en butée, le Traqueur est en position 0/0.
2. Mettre le traqueur à sa référence 0/0
La base mécanique réelle est :
- axe horizontal en butée Est,
- axe vertical en butée basse.
📍 C’est la vraie base physique 0/0 du système.
Sur ce logiciel, cette position correspond à P0.
P0 n’est pas une position à régler. C’est le point d’origine, le point de référence 0/0 mécanique et le 0/0 logiciel.
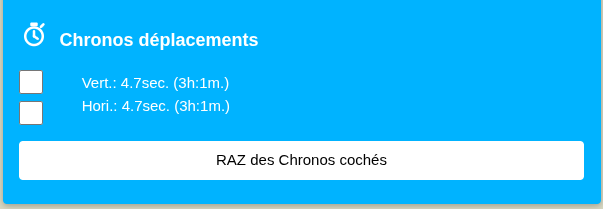
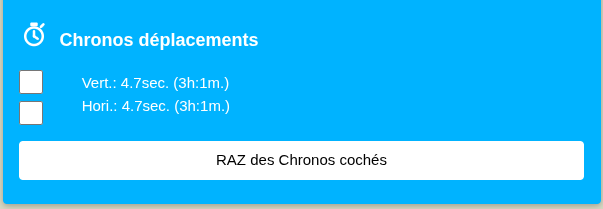
3. Initialiser les chronos
Une fois le traqueur en butée Est + butée basse il faut accorder le logiciel :
- cocher les deux chronos,
- cliquer sur Initialiser les chronos.
les infos entre parenthèses indiquent depuis combien de temps les chronos ont été initialisés. Après le lever du Soleil, le Traqueur vient initialiser ses chronos.
À ce moment :
- les compteurs passent à zéro,
- 0 seconde sur les deux chronos correspond à la position 0/0 réelle.
✅ Référence mécanique et référence chrono deviennent parfaitement accordées.
4. Calibrer les durées de course des vérins
Les durées de course doivent correspondre aux courses réelles des moteurs ou vérins en condition d’utilisation réelle, c’est-à-dire en charge avec les panneaux solaires installés. Tu peux faire des tests à vide si besoin, mais il faudra refaire le calibrage des durées une fois le traqueur installé en condition réelle.
En pratique :
- Durée verticale = 2 durées → temps de course aller et temps de course retour (bas / haut),
- Durée horizontale = 2 durées → temps de course aller et retour (Est / Ouest).
Ces durées servent ensuite à :
- situer la position du traqueur,
- calculer les positions demandées,
- gérer les déplacements automatiques.
⛔ Si les durées sont fausses, le suivi calculé et la mise en position seront faussés.
A savoir : Le matin, lorsque le traqueur se réveille, il vient automatiquement en position 0/0 pour se recaler et avoir des chronos toujours justes.
Le calibrage vient après l’initialisation à 0/0 et le réglage des durées. Il se réalise dans la page Moteurs

Il est conseiller d’utiliser le calibrage automatique, surtout si ton Traqueur possède des fin de course câblés.
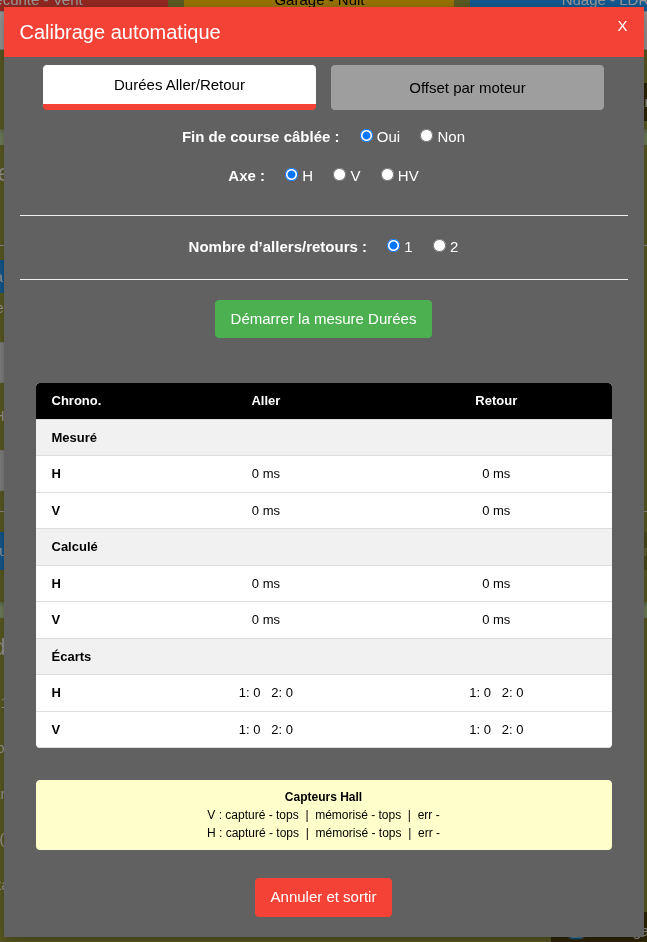
➡️ Le calibrage affine. Il ne remplace pas un mauvais 0/0 ni une mauvaise butée.
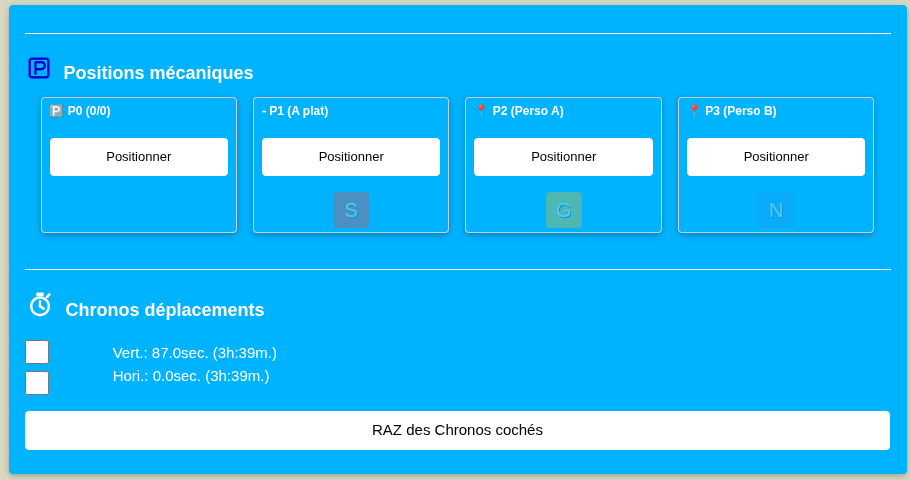
5. Régler les positions
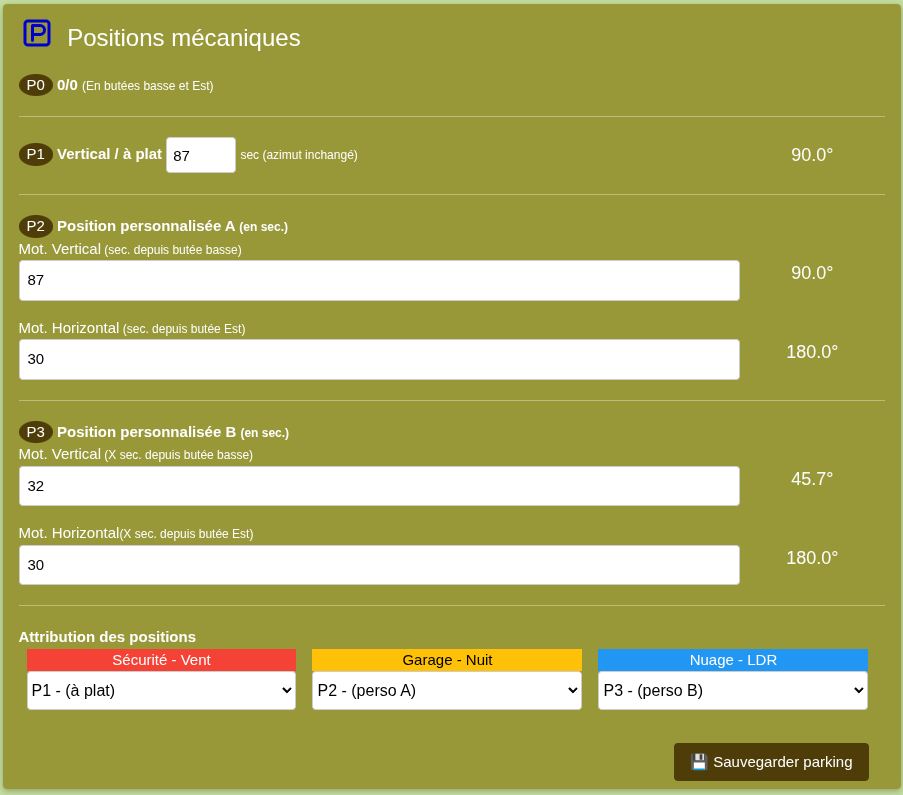
Les positions réglables sont :
- P1
- P2
- P3
P0 est fixe : c’est 0/0.
Pour régler une position on part toujours :
- de la butée d’origine
- EST pour l’azimut
- BASSE pour le vertical
Puis on ajoute un nombre de secondes vers la butée opposée. L’équivalent en degrés est affiché à droite pour faciliter la visualisation des secondes en position d’Azimut et d’Élévation.
- partir de 0 seconde,
- vertical : 0 sec = butée basse,
- horizontal : 0 sec = butée Est,
- ajouter ensuite le nombre de secondes vers la butée opposée.
Donc :
- vers le haut pour le vertical,
- vers l’Ouest pour l’horizontal.
Si tu veux une position à fond sur la butée opposée, tu saisis la durée maximale.
6. Choisir les positions de Sécurité, Garage et Nuage
Une fois les positions réglées, tu choisis laquelle sera utilisée pour :
- Sécurité
- Garage
- Nuage
Le choix se fait parmi :
- P0 = 0/0 fixe (n’es pas réglable, c’est la position d’origine)
- P1
- P2
- P3
🔒 Le parking correspond ici à la position choisie pour Garage / Nuit.
Exemple 1 – Position Garage / Nuit
- Chrono vertical maximal = 80 secondes
- Chrono horizontal maximal = 196 secondes
👉 Je veux placer mon Traqueur en butée haute et en butée Est :
- Configure P2 (ou P3 comme tu veux):
- Vertical = 80 sec
- Horizontal = 0 sec
- Dans le verrou « Garage-Nuit », sélectionne P2
- Sauvegarde
Résultat :
Au coucher du soleil, le traqueur ira en butée haute et en butée EST.
Exemple 2 – Sécurité Vent
- Chrono vertical maximal = 80 secondes
- Chrono horizontal maximal = 196 secondes
👉 Utilise P1
Configure par exemple :
- P1 = 80 sec vertical (le max en butée Haute)
- Dans le verrou « Sécuritè-Vent », sélectionne P1
- Sauvegarde
Dés que la vitesse du Vent dépasse la vitesse autorisée, le panneau se placera dans la position programmée sans toucher à l’Azimut actuel. Dés la fin de la position de sécurité, le Traqueur reprendra son suivi.
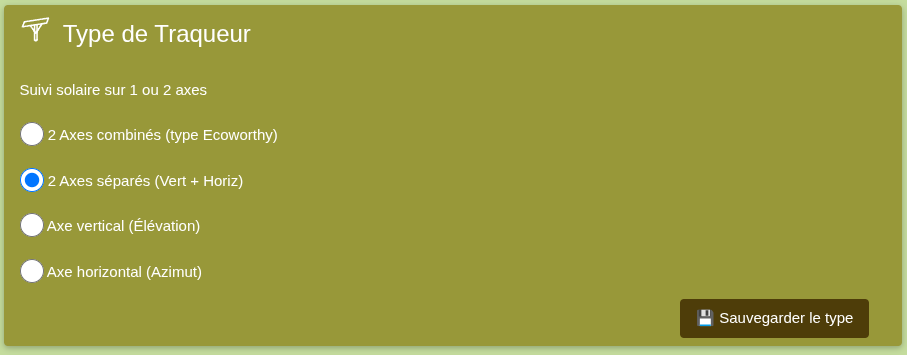
Tu peux aussi utiliser P2 ou P3 si tu veux qu’en position de sécurité, ton Traqueur soit face au Sud par exemple ou si ton Traqueur possède une structure 2 axes combinée type Ecoworthy.
- Chrono vertical maximal = 80 secondes
- Chrono horizontal maximal = 196 secondes
👉 Je veux placer mon Traqueur en butée haute et face au Sud :
- Configure P2 (ou P3 comme tu veux):
- Vertical = 80 sec
- Horizontal = 98 sec (la moitié de la durée maximale horizontale en supposant que ton Traqueur soit face au Sud lorsque le vérin est a mi course)
Dans le verrou « Sécuritè-Vent », sélectionne P2 (ou P3)
Dés que la vitesse du Vent dépasse la vitesse autorisée, le panneau se placera dans la position programmée . Dés la fin de la position de sécurité, le Traqueur reprendra son suivi.
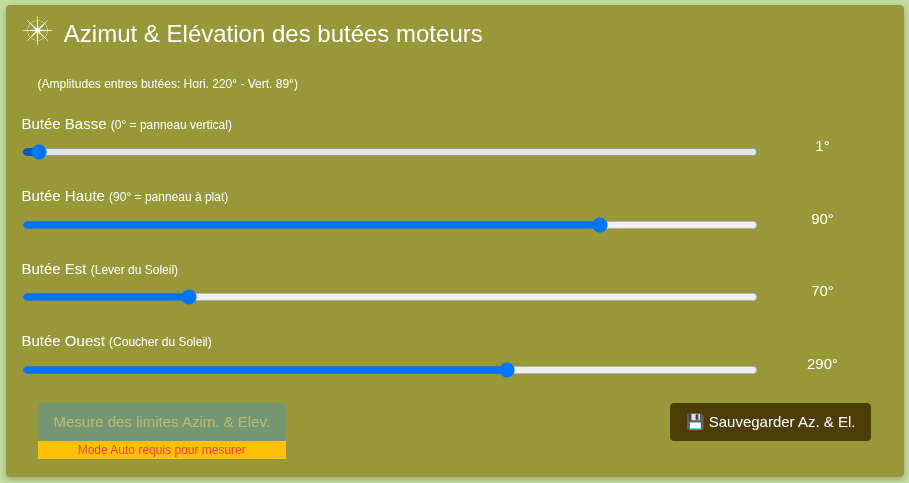
7. Régler les limites
Les limites Est / Ouest et Basse / Haute définissent la plage mécanique autorisée en degrés. Le logiciel les utilise pour ses calculs uniquement. Ce ne sont pas des butées.
Elles indiquent les valeurs Azimut et Elevation des bornes physiques réelles du traqueur.
Les limites ne servent pas à corriger :
- une mauvaise FDC,
- un mauvais 0/0,
- une mauvaise durée.
- les butées.
Selon le type de Traqueur (Axes séparés ou Axes combinés type Ecoworthy), le réglage des limites sera différent. Des infos bulles dans la page du logiciel expliquent la procédure.
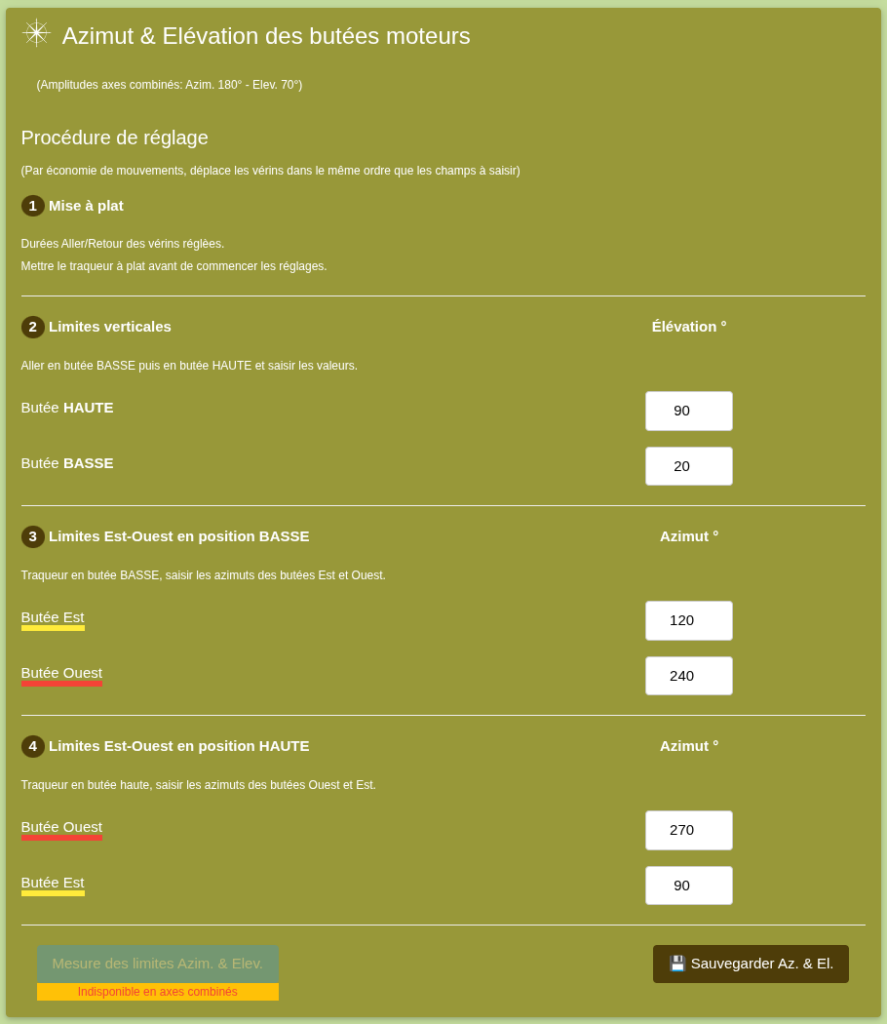
⛔ On règle les limites après la base mécanique, pas avant.
8. Quelle est la suite ?
Si le moteur touche la butée physique alors qu’il ne devrait pas
Passer à : Comprendre / régler les fins de course
Si la mécanique, les positions et le parking sont bons, mais que le traqueur ne suit pas correctement le soleil
Passer à : Comprendre l’alignement : LDR, calculé, nuage, sans capteur
Si le signal ou le comportement moteur semble incohérent
Passer à : Câblage et modules électroniques
Ordre logique dans cette page : 0/0 → chronos → durées → calibrage → positions → verrous → limites
➡️ Retour au forum Traqueur & autres DIY (ESP32)
Soutenir
Les projets de marcosoleil.fr sont partagés librement, dans un esprit orienté vers l’autonomie technique mais aussi vers une évolution personnelle.
Cette démarche s’inscrit dans la continuité de celle de l’association Le Bon Sens de la Vie (loi 1901).
Les contributions sont versées à l’association. Si ça te parle, tu peux contribuer.